

Research on lidar scanning mode
-
摘要:
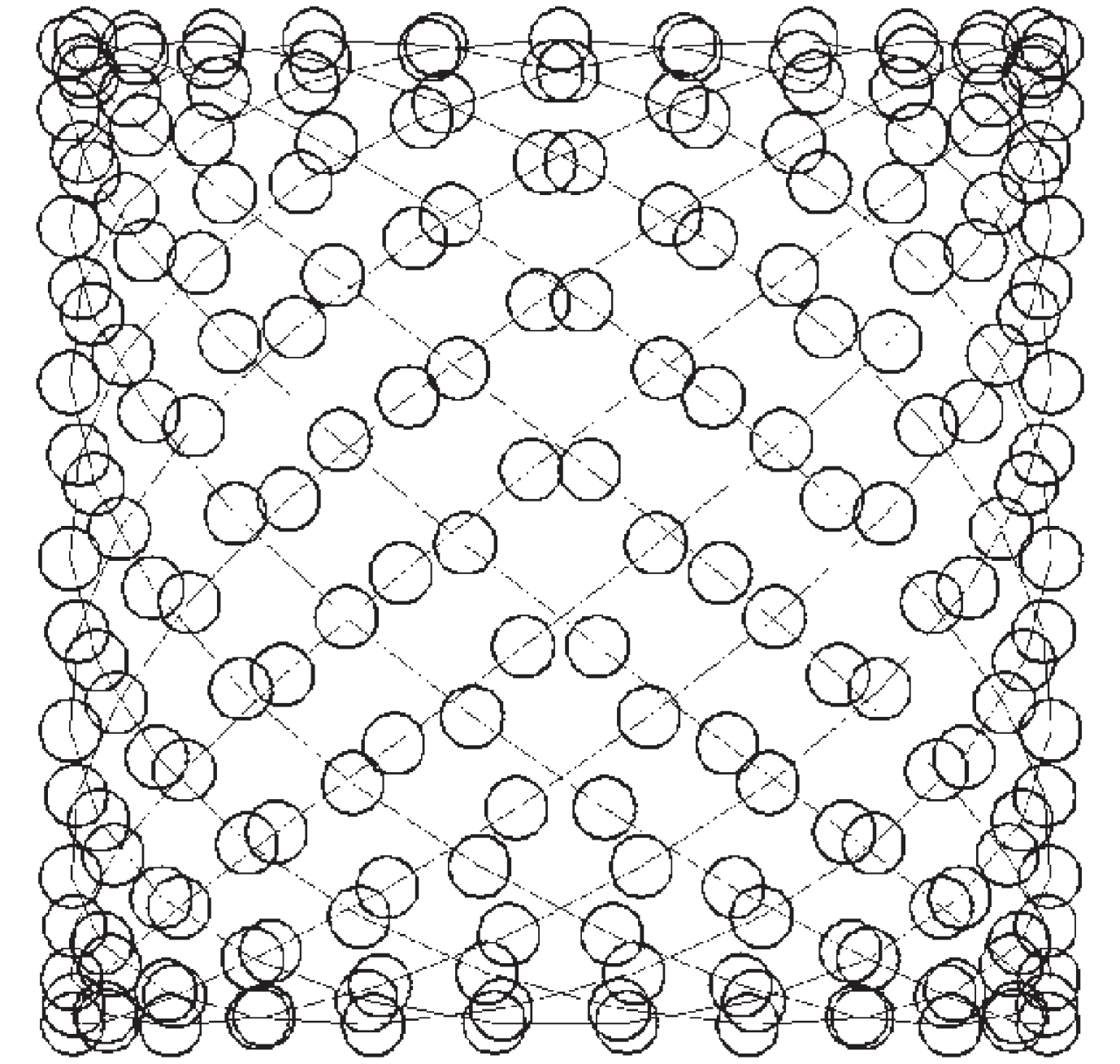
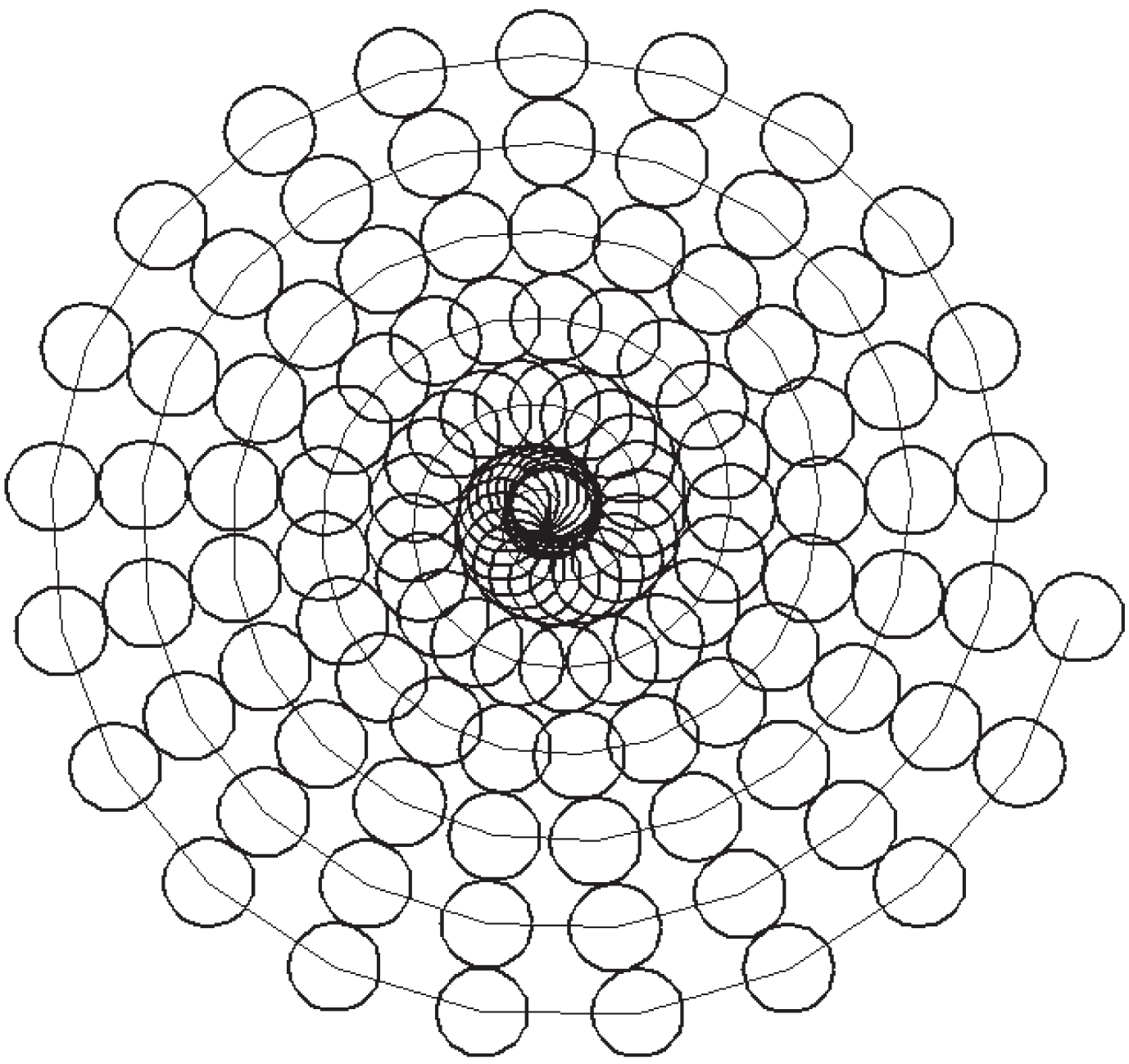
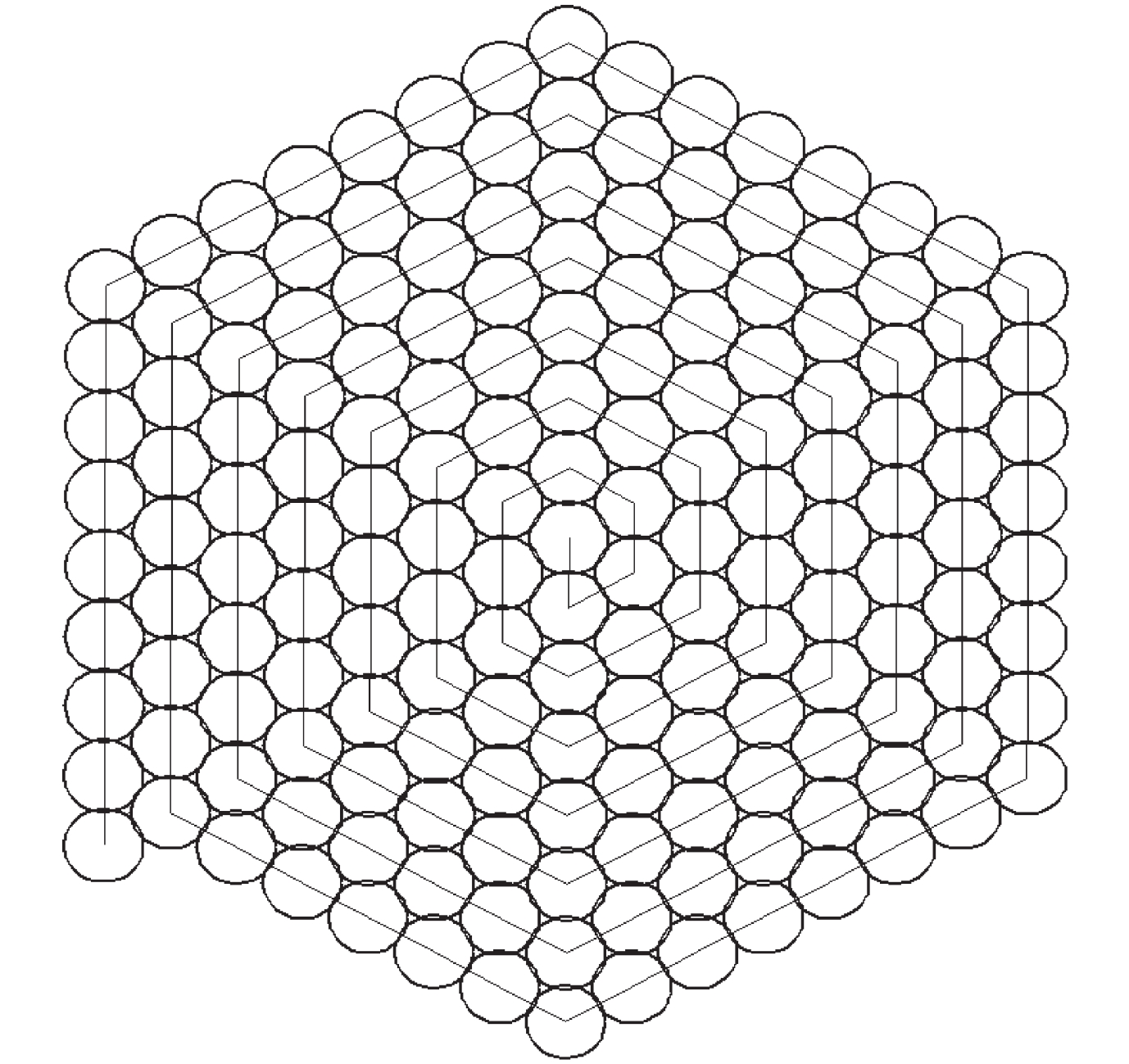
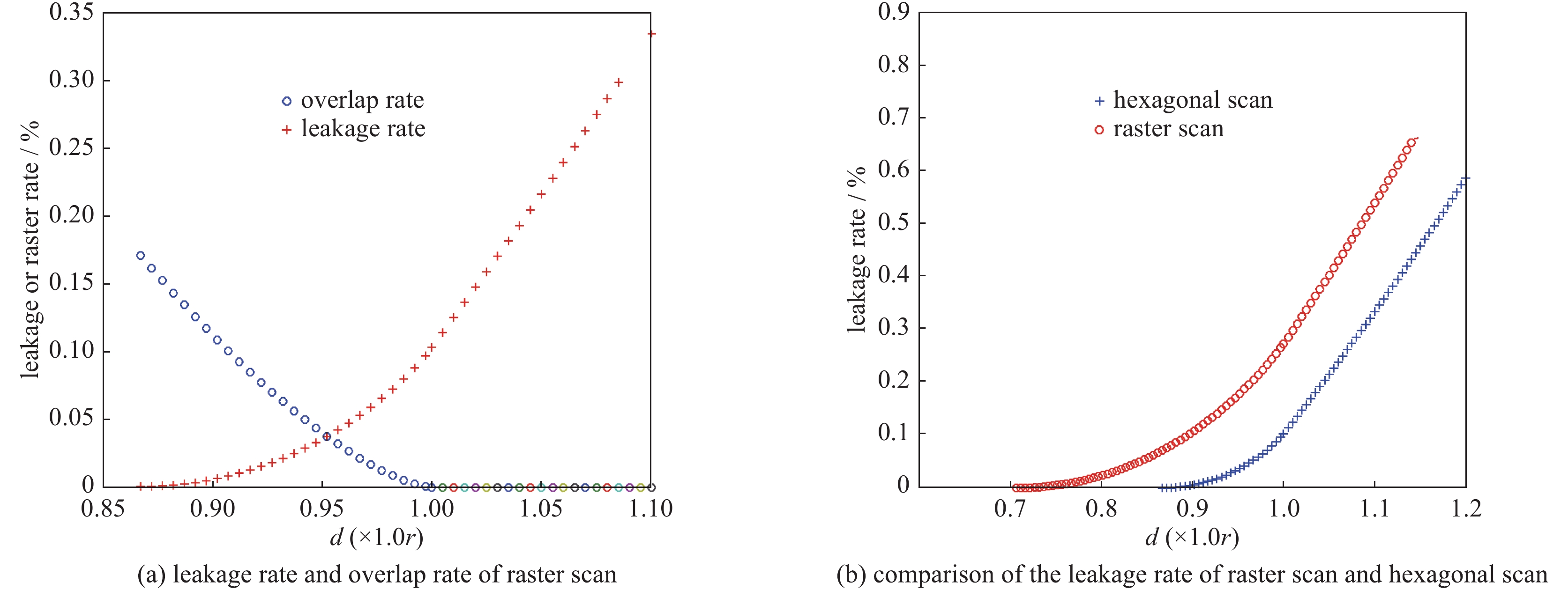
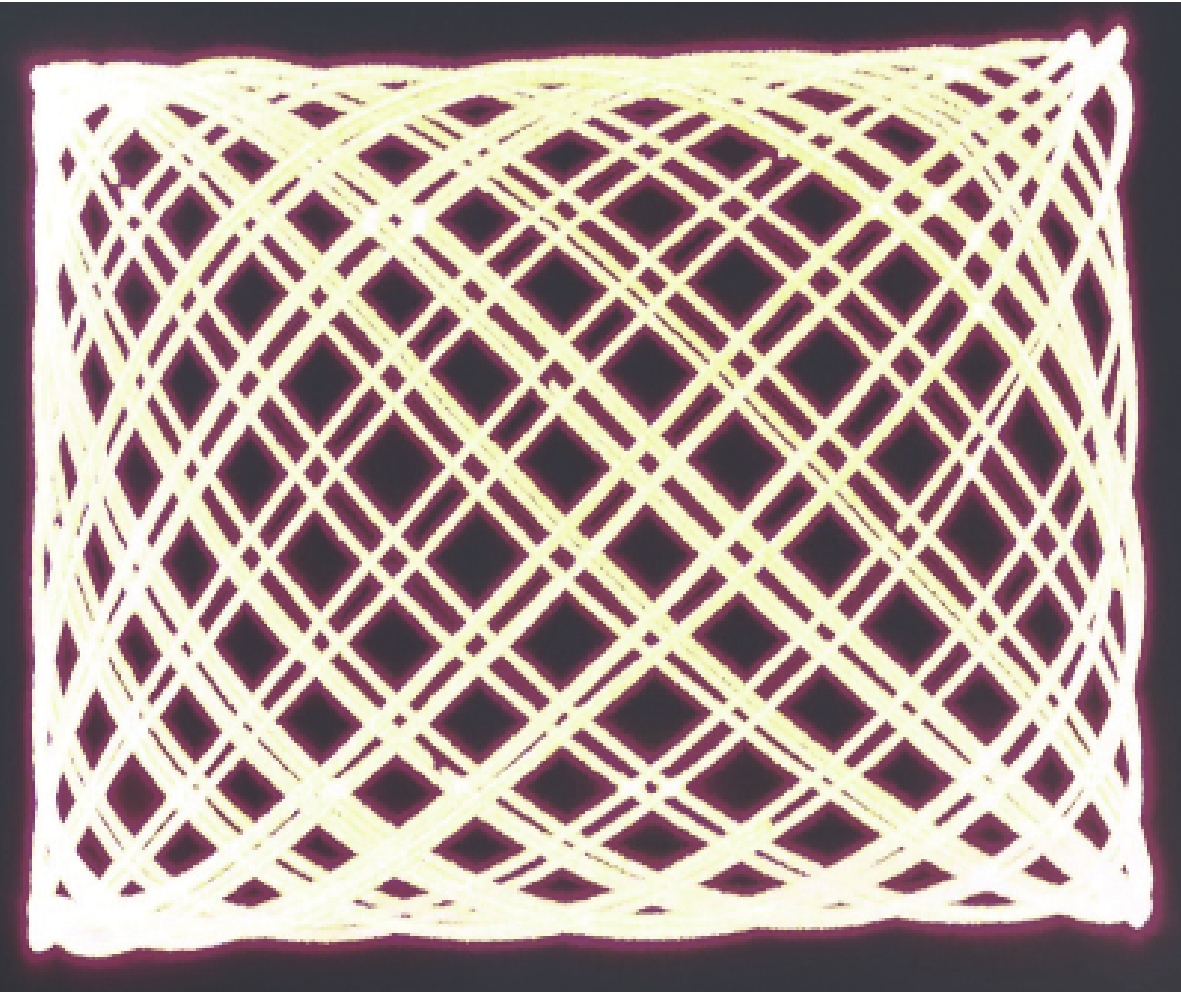
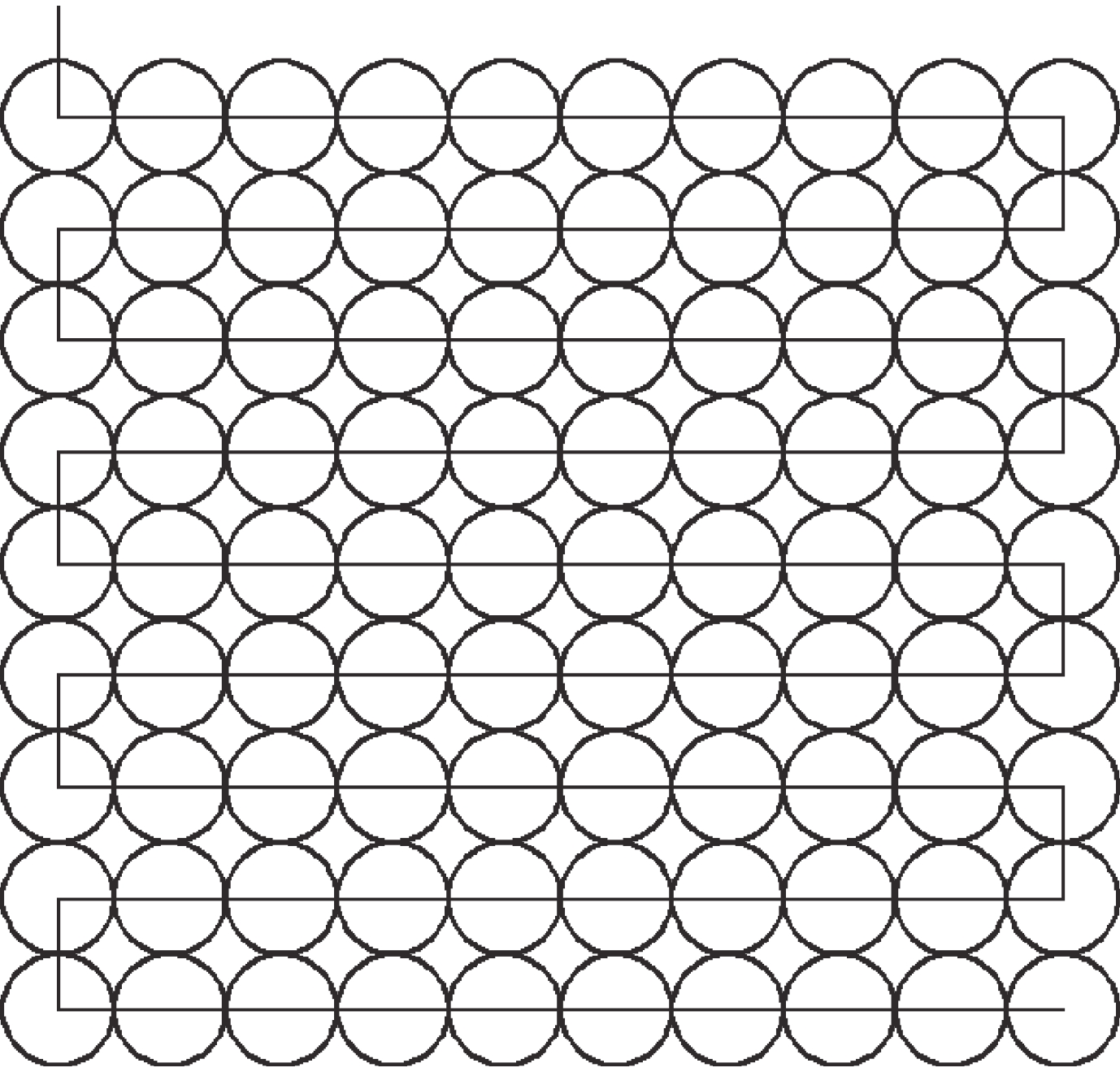
为实现激光束对空域的有效扫描和探测,研究了栅形扫描、李萨茹形扫描、螺旋形扫描和六边形扫描四种常见的激光雷达扫描方式,推导了相应的扫描方程,讨论了参数的物理意义及调整方法;重点研究了栅形扫描和六边形扫描方式下光斑的分布情况,通过仿真分析了两种扫描方式下光束的漏扫率和重叠率,结果表明,在相同扫描条件下六边形扫描方式的漏扫区域最少。展示了基于上述研究内容的扫描控制系统实物图及扫描图案。分析总结了四种扫描方式的特点,给出了每种扫描方式的适用情况及使用建议。
Abstract:Scanning lidar is widely used in atmospheric remote sensing detection and target capture. To realize the effective detection of lidar, this paper studies four common scanning modes of lidar: raster scanning, Lissajo scanning, spiral scanning and hexagonal scanning. The corresponding scanning equation is deduced, and the physical meaning and adjustment method of parameters are discussed. Aiming at the requirement of fine scanning in atmospheric remote sensing detection, the distribution of spot under raster scanning and hexagonal scanning is studied. The leakage rate and overlap rate of these two scanning modes are simulated and analyzed. The results show that under the same scanning condition, the leakage area of hexagonal scanning mode is the smallest. The physical image and scan pattern of scanning control system based on the above research are presented. Finally, the characteristics of these four scanning modes are summarized, and their application and suggestions are given.
-
Key words:
- lidar /
- atmospheric remote sensing detection /
- scanning mode
-
[1] 王青梅, 张以谟. 气象激光雷达的发展现状[J]. 气象科技, 2006, 34(3):246-249. (Wang Qingmei, Zhang Yimo. Development of meteorogical lidar[J]. Meteorological Lidar Science and Technology, 2006, 34(3): 246-249 doi: 10.3969/j.issn.1671-6345.2006.03.002 [2] 陈超, 王章军, 宋小全, 等. 扫描式气溶胶激光雷达研制与观测研究[J]. 红外与激光工程, 2018, 47:1230009. (Cheng Chao, Wang Zhangjun, Song Xiaoquan, et al. Development and observational studies of scanning aerosol lidar[J]. Infrared and Laser Engineering, 2018, 47: 1230009 [3] 赵一鸣, 李艳华, 商雅楠, 等. 激光雷达的应用及发展趋势[J]. 遥测遥控, 2014, 35(5):3-6. (Zhao Yiming, Li Yanhua, Shang Ya’nan, et al. Application and development direction of lidar[J]. Journal of Telemetry, Tracking and Command, 2014, 35(5): 3-6 [4] 位寅生, 杨思亮. 单脉冲雷达扫描方式分析与仿真[J]. 系统工程与电子技术, 2011, 33(2):468-472. (Wei Yinsheng, Yang Siliang. Analysis and simulation of monopulse radar scanning modes[J]. Systems Engineering and Electronics, 2011, 33(2): 468-472 doi: 10.3969/j.issn.1001-506X.2011.02.47 [5] 马辰昊, 付跃刚, 宫平, 等. 一种激光雷达复合式扫描方法及试验[J]. 红外与激光工程, 2015, 44(11):3270-3272. (Ma Chenhao, Fu Yuegang, Gong Ping, et al. A composite scanning method and experiment of laser radar[J]. Infrared and Laser Engineering, 2015, 44(11): 3270-3272 doi: 10.3969/j.issn.1007-2276.2015.11.018 [6] 李慧剑. 运动目标探测激光扫描系统设计与原理实验[D]. 西安: 西安电子科技大学, 2013: 28-30.Li Huijian. Design and principle experiment of laser scanning system for moving target detection[D]. Xi’an: Xidian University, 2013: 28-30 [7] 张韫卿. 运动目标激光探测的捕获概率与跟踪算法研究[D]. 西安: 西安电子科技大学, 2014: 13-16.Zhang Yunqing. Capture probability and tracking algorithm of moving target in laser detection[D]. Xi’an: Xidian University, 2014: 13-16 [8] 张大卫, 冯晓梅. 音圈电机的技术原理[J]. 中北大学学报, 2006:224-228. (Zhang Dawei, Feng Xiaomei. The technical principle of voice-coil actuator[J]. Journal of Zhongbei University, 2006: 224-228 [9] 冯国柱, 杨华军, 邱琪, 等. 螺旋式扫描在激光雷达系统中的仿真优化分析[J]. 红外与激光工程, 2006, 35(2):166-168. (Feng Guozhu, Yang Huajun, Qiu Qi, et al. Analyzing from simulation of optimizing the spiral scan in the laser radar system[J]. Infrared and Laser Engineering, 2006, 35(2): 166-168 [10] Chen Wenqing, Wang Jianbin, Wang Xuejun, et al H. Detection probability analysis of airborne radar for marine target[C]//The 6th International Symposium on Microwave, Antenna, Propagation, and Electromagnetic Compatibility Technologies(MAPE 2015). 2015: 730-733. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 3453
- HTML全文浏览量: 1348
- PDF下载量: 208
- 被引次数: 0
