

Contact stiffness measurement based on modal matching method
-
摘要: 提出一种间接测量平面接触刚度的方法,准确量化粗糙表面的接触刚度,使得整个支架系统的固有频率模拟与测试结果得到良好的匹配。基于接触刚度模型、ANSYS有限元模拟方法以及模态测试方法,以地脚螺栓固定方式的测试件为例,验证了间接测量方法的准确性,使接触刚度得到准确量化。该方法可以为提高加速器磁铁支架系统的整体刚度提供依据。
-
关键词:
- 磁铁支架 /
- 接触刚度 /
- 模态测试 /
- ANSYS有限元分析 /
- 模态匹配
Abstract: In the simulation of the accelerator magnet support system, the parts connected to the ground by the magnet bracket are usually treated as “fixed”, but in some cases, this treatment will cause a large error between the simulation results and the measurement results. This paper proposes an indirect method to measure the contact stiffness of rough surface, accurately quantify the contact stiffness of rough surface, and make the simulation of the whole system well match with the test results. Based on the contact stiffness model, ANSYS finite element simulation method and modal test method, the accuracy of indirect measurement method was verified by taking the test piece of anchor bolt fixation method as an example, so that the contact stiffness was accurately quantified. This method can also provide a basis for improving the overall stiffness of the accelerator magnet support system. -
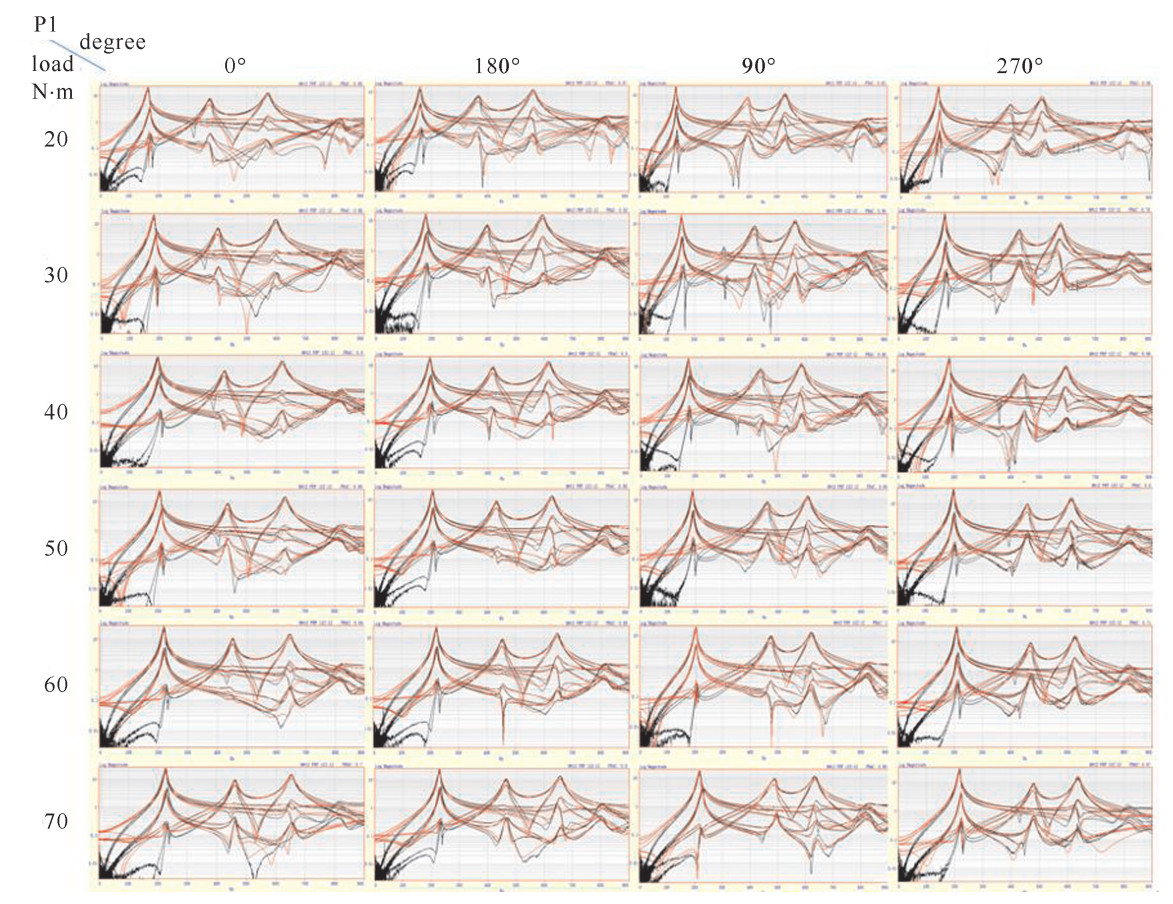
图 5 测量工具模态测试结果频响函数曲线
Figure 5. Frequency response function curves of modal test results
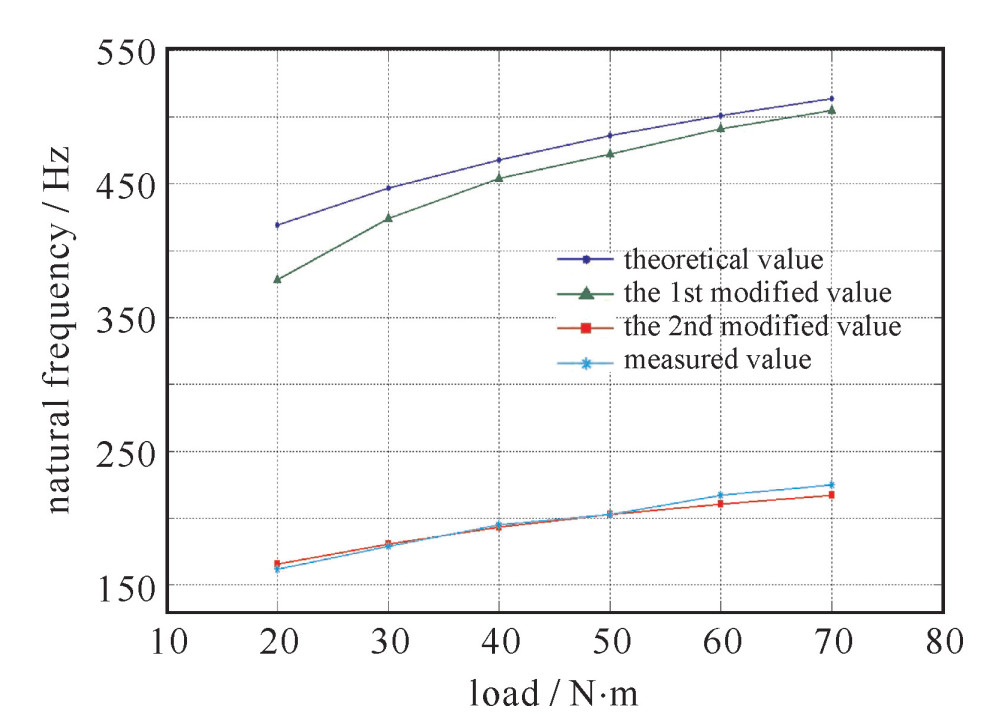
图 7 P1第一阶模态结果修正过程曲线
Figure 7. Correction process curve of the first mode results of P1
表 1 固有频率测试结果
Table 1. Natural frequency test results
natural frequency/Hz load/(N·m) a=0° a=180° a=90° a=270° 1st
order2nd
order3rd
order1st
order2nd
order3rd
order1st
order2nd
order3rd
order1st
order2nd
order3rd
order20 162 373 570 161 368 561 134 391 528 135 393 505 30 179 399 596 179 396 592 154 418 564 166 431 575 40 195 421 618 193 416 613 175 439 586 181 444 593 50 203 435 630 206 431 627 190 460 605 198 457 612 60 217 451 644 220 452 645 200 472 620 208 469 626 70 225 461 652 228 464 655 216 484 633 216 478 635  下载: 导出CSV
下载: 导出CSV
表 2 接触参数
Table 2. Contact parameters
orientation load/(N·m) An/(10-3m2) Pi E/1010Pa Wt*/10-4 h* Kt*/10-4 σ/10-9m Kt/(1013N·m-1) 20 1.19 1.46 1.95 0.647 0° 40 1.58 0.7 2.56 2.38 1.08 3.12 1.22 1.03 60 3.56 0.833 4.04 1.34 20 1.19 1.46 1.95 0.647 180° 40 1.58 0.7 2.56 2.38 1.08 3.12 1.22 1.03 60 3.56 0.833 4.04 1.34 20 1.19 1.46 1.95 0.647 90° 40 1.58 0.7 2.56 2.38 1.08 3.12 1.22 1.03 60 3.56 0.833 4.04 1.34 20 1.19 1.46 1.95 0.647 270° 40 1.58 0.7 2.56 2.38 1.08 3.12 1.22 1.03 60 3.56 0.833 4.04 1.34
下载: 导出CSV
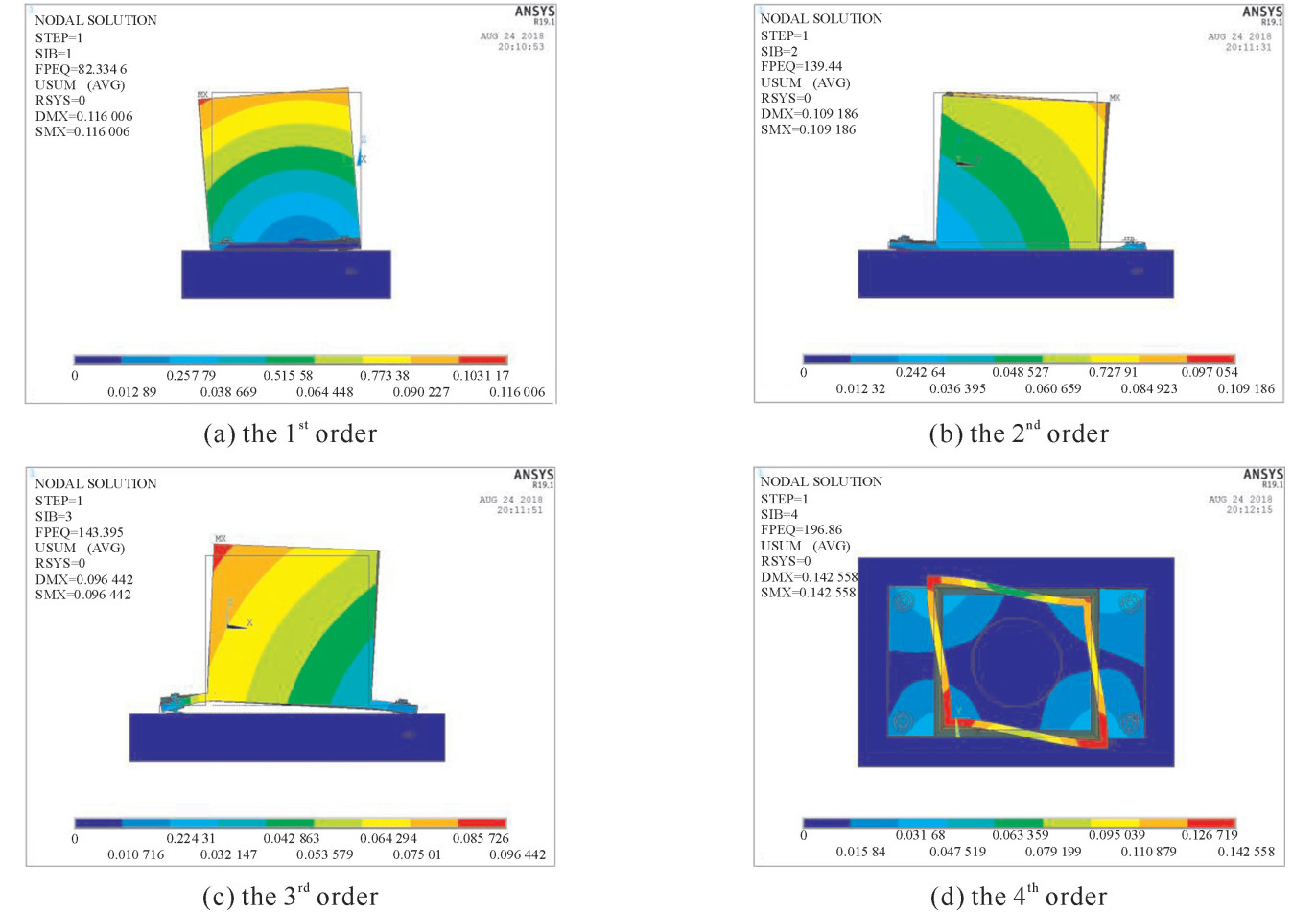
表 3 测试件模拟结果与测量结果前四阶固有频率数值对比
Table 3. Comparison of natural frequencies
test load/(N·m) simulated natural frequency/Hz measured natural frequency/Hz error 1st
order2nd
order3rd
order4th
order1st
order2nd
order3rd
order4th
order1st
order2nd
order3rd
order4th
order1 20 70 125 131 190 86 144 152 194 18% 13% 14% 2% 2 30 82 139 143 197 92 159 171 196 11% 12% 16% 0% 3 40 88 147 151 200 103 150 165 190 15% 2% 9% 5% 4 50 91 151 154 202 105 150 168 194 14% 1% 8% 4% 5 60 93 155 159 204 107 151 171 195 13% 3% 7% 5% 6 70 95 158 161 205 108 150 174 195 12% 5% 7% 5% 7 80 96 160 163 206 109 173 182 196 12% 7% 10% 5% 8 90 98 162 165 207 109 150 182 197 10% 8% 9% 5% 9 100 98 163 167 208 110 150 181 197 10% 9% 8% 5% 10 110 99 164 168 208 112 155 182 199 11% 6% 8% 5% 11 - 176 267 275 288 - - - - 57% 72% 51% 45%
下载: 导出CSV
表 4 不同约束方式模拟结果对比
Table 4. Comparison of simulation results
constraint way natural frequency/Hz error 1st 2nd 1st 2nd measurement 63.5 95.6 contact 71.6 95.9 12.8% 0.3% simulation partially fixed 98 101 54.3% 5.6% fixed 296 312 366.1% 226.4%
下载: 导出CSV
表 5 测量和模拟结果对比
Table 5. Comparison of measurement and simulation results
simulation natural frequency/Hz measurement natural frequency/Hz error 1st 2nd 1st 2nd 1st 2nd 25.6 29.6 24.4 27.4 4.9% 8.0%
下载: 导出CSV
-
[1] Preissner C, Cease H, Collins J, et al. Nostradamus and the synchrotron engineer: Key aspects of predicting accelerator structural response[C]//International Conference on Mechanical Engineering Design of Synchrotron Radiation Equipment and Instrumentation. 2016: 272-276. [2] Nudell J, Liu Z, Preissner C, et al. Preliminary design and analysis of the FODO module support system for the APS-U storage ring[C]//International Conference on Mechanical Engineering Design of Synchrotron Radiation Equipment and Instrumentation. 2016: 83-86. [3] Cianciosi F, Brochard T, Marion P, et al. The girder system for the new ESRF storage ring[C]//International Conference on Mechanical Engineering Design of Synchrotron Radiation Equipment and Instrumentation. 2016: 147-151. [4] 陈学前, 沈展鹏, 刘信恩, 等. 地脉动环境下反射镜架系统的镜片转角响应计算[J]. 强激光与粒子束, 2018, 30: 072001. doi: 10.11884/HPLPB201830.170529Chen Xueqian, Shen Zhanpeng, Liu Xin'en, et al. Analysis on rotation angle of mirror in reflector system under ground random vibration. High Power Laser and Particle Beams, 2018, 30: 072001 doi: 10.11884/HPLPB201830.170529 [5] 王坤, 何静, 游安清. 光束-靶面入射角非接触式测量方法分析[J]. 强激光与粒子束, 2014, 26: 101010. doi: 10.11884/HPLPB201426.101010Wang Kun, He Jing, You Anqing. Analysis on non-contact measurement of ray-target incident angle. High Power Laser and Particle Beams, 2014, 26: 101010 doi: 10.11884/HPLPB201426.101010 [6] 张敏, 赵平, 张蓉. 气浮隔振平台模态实验分析[J]. 强激光与粒子束, 2013, 25(S0): 87-90. http://www.hplpb.com.cn/article/id/7799Zhang Min, Zhao Ping, Zhang Rong. Application of black-box testing technologies to command and control subsystem software testing. High Power Laser and Particle Beams, 2013, 25(S0): 87-90 http://www.hplpb.com.cn/article/id/7799 [7] 杨航, 汪玉兰, 汪雪, 等. 精密热处理过程温度测量多模态重构方法[J]. 强激光与粒子束, 2019, 31: 012003. doi: 10.11884/HPLPB201931.180060Yang Hang, Wang Yulan, Wang Xue, et al. Multimodal reconstruction method of precision heat treatment process's temperature measurement. High Power Laser and Particle Beams, 2019, 31: 012003 doi: 10.11884/HPLPB201931.180060 [8] 田小龙, 王雯, 傅卫平, 等. 考虑微凸体相互作用的机械结合面接触刚度模型[J]. 机械工程学报, 2017, 53(17): 149-159.Tian Xiaolong, Wang Wen, Fu Weiping, et al. Contact stiffness model of mechanical joint surfaces considering the asperity interactions. 2017, 53(17): 149-159 [9] Greenwood J, Williamson J. Contact of nominally flat surfaces[J]. Proceedings of the Royal Society, 1966, 295(42): 300-319. [10] Chang W, Etsion I, Bogy D. An elastic-plastic model for the contact of rough surfaces[J]. Journal of Tribology, 1987, 109(2): 257-263. doi: 10.1115/1.3261348 [11] Zhao Yongwu, Maietta D, Chang Liang. An asperity microcontact model incorporating the transition from elastic deformation to fully plastic flow[J]. Journal of Tribology, 1999, 122(1): 86-93. [12] Zhao Yongwu, Chang Liang. A model of asperity interactions in elastic-plastic contact of rough surfaces[J]. Journal of Tribology, 2000, 123(4): 857-864. https://pennstate.pure.elsevier.com/en/publications/a-model-of-asperity-interactions-in-elastic-plastic-contact-of-ro [13] Kogut L, Etsion I. A finite element based elastic-plastic model for the contact of rough surfaces[J]. Tribology Transactions, 2003, 46(3): 383-390. doi: 10.1080/10402000308982641 [14] Nuri K, Halling J. The normal approach between rough flat surfaces in contact[J]. Wear, 1975, 32(1): 81-93. https://www.sciencedirect.com/science/article/pii/0043164875902069 [15] WangHaijing, Li Chunhua, Zhu Hongyan, et al. Test of magnet girder prototypes for HEPS-TF[C]//International Particle Accelerator Conference. 2018: 76-79. -






 点击查看大图
点击查看大图

计量
- 文章访问数: 1648
- HTML全文浏览量: 432
- PDF下载量: 76
- 被引次数: 0
