

High-precision Runge-Kutta method for transmission line equation
-
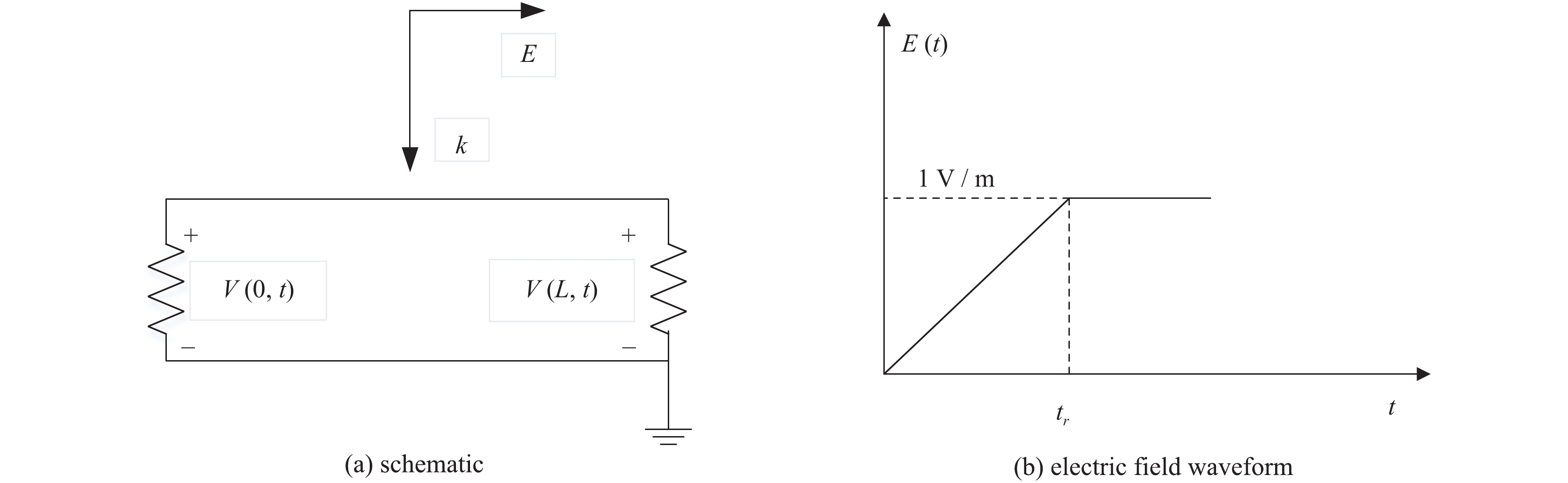
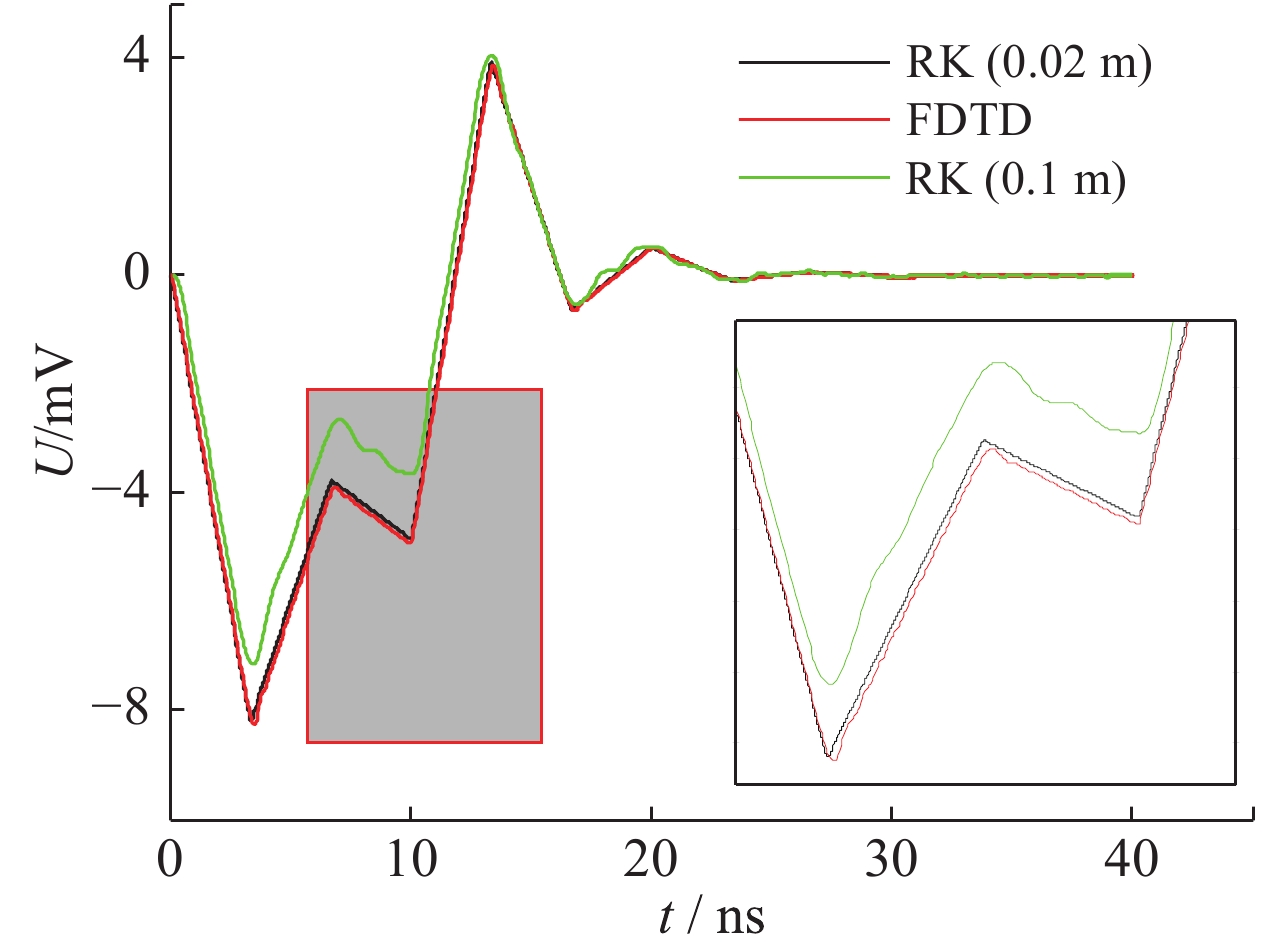
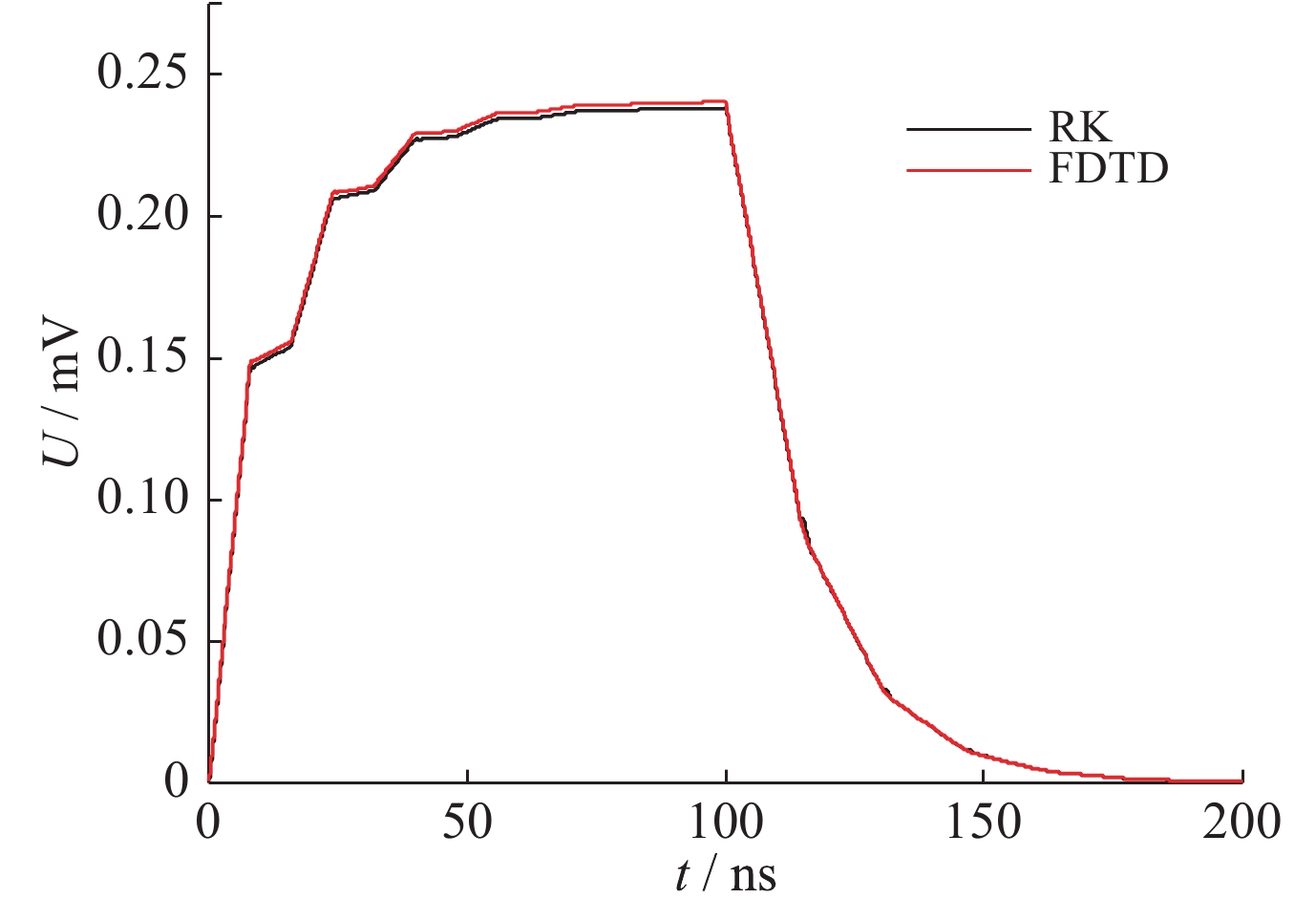
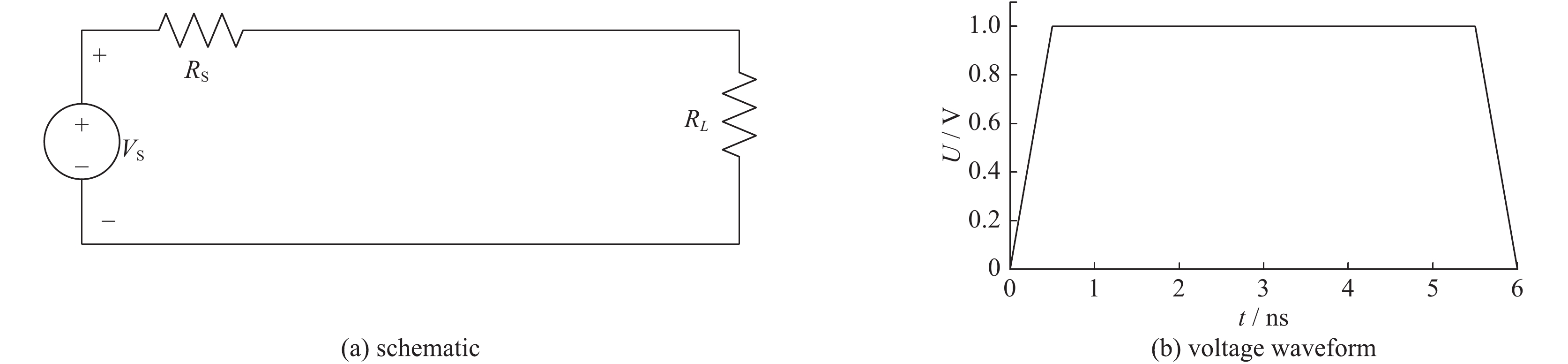
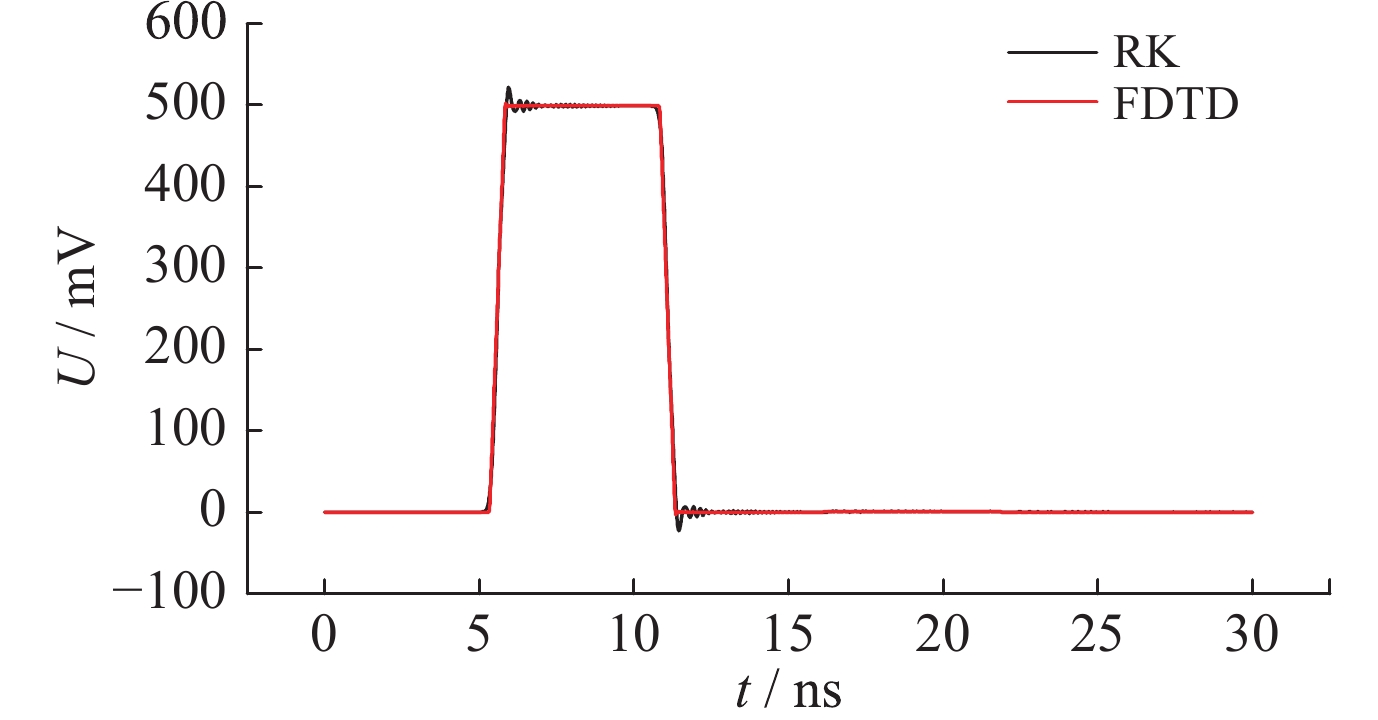
摘要: 提出了一种求解传输线方程的高精度龙格-库塔(RK)方法。此方法在空间上采取高阶泰勒展开,提高了对空间微分的近似精度,减少了数值色散所带来的误差。与传统的时域有限差分法(FDTD)方法相比,在每波长采样数相同时,RK方法的计算精度更高。同时,根据Taylor模型,对外界平面波激励源进行离散,成功利用RK方法对外部场激励传输线进行求解,扩大了龙格−库塔方法在求解传输线方程时的应用范围。通过编程对平面波辐照下无限大地平面上的单导体与双导体的算例分别应用FDTD方法与RK方法进行了计算,验证了RK方法的正确性。结果表明同等计算条件下RK方法的计算精度更高。Abstract: This paper presents a high-precision Runge-Kutta (RK) method for solving transmission line equations. This method adopts high-order Taylor expansion in space, which improves the approximation accuracy of spatial differentiation. Compared with the traditional finite element time-domain method, when the number of samples per wavelength is the same, RK method has higher precision. At the same time, according to the Taylor model, researchers use RK method to solve transmission line equation in the external field excitation. The correctness and high precision of the RK method are verified by numerical examples of our study.
-
Key words:
- Runge-Kutta /
- field-line coupling /
- transmission line /
- FDTD /
- Taylor expansion
-
[1] 张希. 有损均匀传输线数值解的研究[D]. 重庆: 重庆大学, 2003: 42-59.Zhang Xi. Reasearch on lossy and uniform transmission line numerical solution[D]. Chongqing: Chongqing University, 2000: 21-30 [2] 张希, 刘宗行, 孙韬, 等. 传输线方程的一种数值解法[J]. 重庆大学学报(自然科学版), 2004, 27(2):116-119. (Zhang Xi, Liu Zongxing, Sun Tao, et al. A numerical method for transmission line equations[J]. Journal of Chongqing University(Natural Science Edition), 2004, 27(2): 116-119 [3] 杨阳. 龙格库塔法求模糊微分方程的数值解[D]. 哈尔滨: 哈尔滨工业大学, 2015: 25-35.Yang Yang. Numerical solution of fuzzy differential equations by Runge-Kutta method[D]. Harbin: Harbin Institute of Technology, 2015: 25-35 [4] 秦浩东, 吴志强, 张晏铭, 等. 龙格-库塔方法与差分法的比较[J]. 成都大学学报(自然科学版), 2014, 33(4):337-338. (Qin Haodong, Wu Zhiqiang, Zhang Yanming, et al. Comparison of Runge-Kutta method and difference method[J]. Journal of Chengdu University(Natural Science Edition), 2014, 33(4): 337-338 [5] 陈山. 求解波动方程的龙格-库塔型方法及其地震波传播模拟[D]. 北京: 清华大学, 2010: 8-10.Chen shan. The Runge-Kutta type method for solving wave equations and its simulation of seismic wave propagation[D]. Beijing: Tsinghua University, 2010: 8-10 [6] 梁华力, 富明慧. 一种改进的精细-龙格库塔法[J]. 中山大学学报(自然科学版), 2009, 48(5):2-5. (Liang Huali, Fu Minghui. An improved precise Runge-Kutta integration[J]. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2009, 48(5): 2-5 [7] 关冶, 陆金甫. 数值分析基础[M]. 北京: 高等教育出版社, 2010.Guan Ye, Lu Jinpu. Fundamentals of numerical analysis[M]. Beijing: Higher Education Press, 2010 [8] Paul C R. 多导体传输线分析[M]. 3版. 北京: 中国电力出版社, 2013.Paul C R. Analysis of multiconductor transmission lines[M]. 3rd ed. Beijing: China Electric Power Press, 2013 [9] 葛德彪, 闫玉波. 电磁波时域有限差分法[M]. 3版. 西安: 西安电子科技大学出版社, 2011.Ge Debiao, Yan Yubo. Finite-difference time-domain method for electromagnetic waves[M]. 3rd ed. Xi′an: Xidian University Press, 2011 [10] 冀维林. 基于FDTD算法的多导体传输线电磁兼容的研究[D]. 北京: 北京邮电大学, 2010: 21-43.Ji Weilin. Study on electromagnetic compatibility of transmission line based on FDTD method[D]. Beijing: Beijing University of Posts and Telecommunications, 2010: 21-43 -

 下载:
下载:

 点击查看大图
点击查看大图
图(8)
计量
- 文章访问数: 2964
- HTML全文浏览量: 830
- PDF下载量: 86
- 被引次数: 0
