

Measurement signal processing technology for magnetic axis of solenoid based on pulsed tuat-wire method
-
摘要: 针对螺线管磁轴测量中的悬丝位置、测量信号失真、磁轴偏轴和磁轴倾斜信号的分离数据处理要求等问题,采用一种高偏置消除的信号检测与测量方法,并对探测器采用了相关的恒定驱动技术,进一步提高了信号产生的稳定性及抗干扰能力,研制了一种可以获得比较直接的悬丝振动信号的测量系统,解决了单纯采用交流耦合隔直滤波放大器或带通滤波放大器不能获得完全准确的测量信号的问题,确保了在较高的直流偏置下获得没有畸变的较小测量信号,消除了测量信号中低频分量基线倾斜及其中起伏的影响,并实现了磁轴偏移和磁轴倾斜信号的分离,极大地提高了螺线管线圈磁轴的测量灵敏度,实际测试结果显示测量灵敏度提高约1个量级。Abstract: In measurement of magnetic axis of solenoid, there are some key difficulties to overcome, such as precision measurement of tuat-wire vibration and position, reducing measurement signal distortion, and separative data processing for offset and tilt signal in magnetic axis of solenoid. One kind of signal detect and measurement principle of extracting the useful faintness signal via subtracting the high offset level signal from the total measurement signal is adopted to meet the above need. The method of constant current driving the detector is also adopted to obtain more stable and anti-jamming signal. The measurement system has been developed for directly obtaining the pure vibration signal of the tuat-wire. The problems of obtaining completely exact measurement signal by simply using an AC coupling amplifier or band-pass filter are resolved and the faint signal can be obtained without aberration. The influence produced by tilt and ups-and-downs in low frequency component of base line signal is eliminated ulteriorly. The separative data processing for offset and tilt signal is also achieved to some extent. The measurement sensitivity has been improved maximumly by about an order of magnitude.
-
螺线管线圈是直线感应加速器中大量使用的关键部件[1-2],其性能直接影响强流电子束束流的传输效果及束流的聚焦效果,因此需要对其磁轴的分布及偏离进行高精度的检测与测量。在螺线管线圈的磁轴测量技术中,脉冲悬丝法相比其他测量方法具有较多的优点,是目前一种非常有效且一直被普遍采用的测量方法[3-5],获得了广泛的应用。在过去,由于悬丝振动的位置测量系统中均普遍地采用了基于单纯信号放大的原理[5-7],无论具体采用何种测量线路,从未脱离过这一原理,导致测量系统的安装与调试存在一定的不便性及不准确性,性能不足也导致磁轴测量信号中的偏移与倾斜信号始终耦合在一起;同时由于磁轴的有效测量信号是叠加在大幅度的振动信号之上的一个较小幅度的信号,即有效测量信号幅度较小,采用上述测量原理的线路无法获得足够幅度的有效测量信号,给后续信号处理带来一定的困难,对测量精度造成较严重的影响。
通过对基于悬丝法的磁轴测量技术的基本原理及原有探测器信号处理线路的分析,提出了一种基于消除高偏置水平的信号处理线路原理,单纯地对悬丝振动时产生的信号电流进行变换处理,消除了原线路工作点的变化与信号电流变化耦合在一起对测量信号产生影响的关键问题;同时,为了提高测量系统抗外界干扰信号的能力,采用了高精度恒流驱动形式对探测器进行驱动,另一方面,为了降低探测器工作点变化对输出信号电流的影响,采用了虚拟地接入方式对探测器的输出端进行驱动与信号提取,在确保探测器工作点不变的情况下获得比较纯粹的悬丝振动位置信号用于螺线管线圈的磁轴信号处理,在很大程度上消除了原来测量信号中的低频基线倾斜及起伏对测量信号的影响,使磁轴测量信号中的偏移与倾斜信号更加容易分离,提高了测量信号的分辨能力,进而提高了测量精度。
1. 悬丝法螺线管线圈磁轴测量技术基本原理
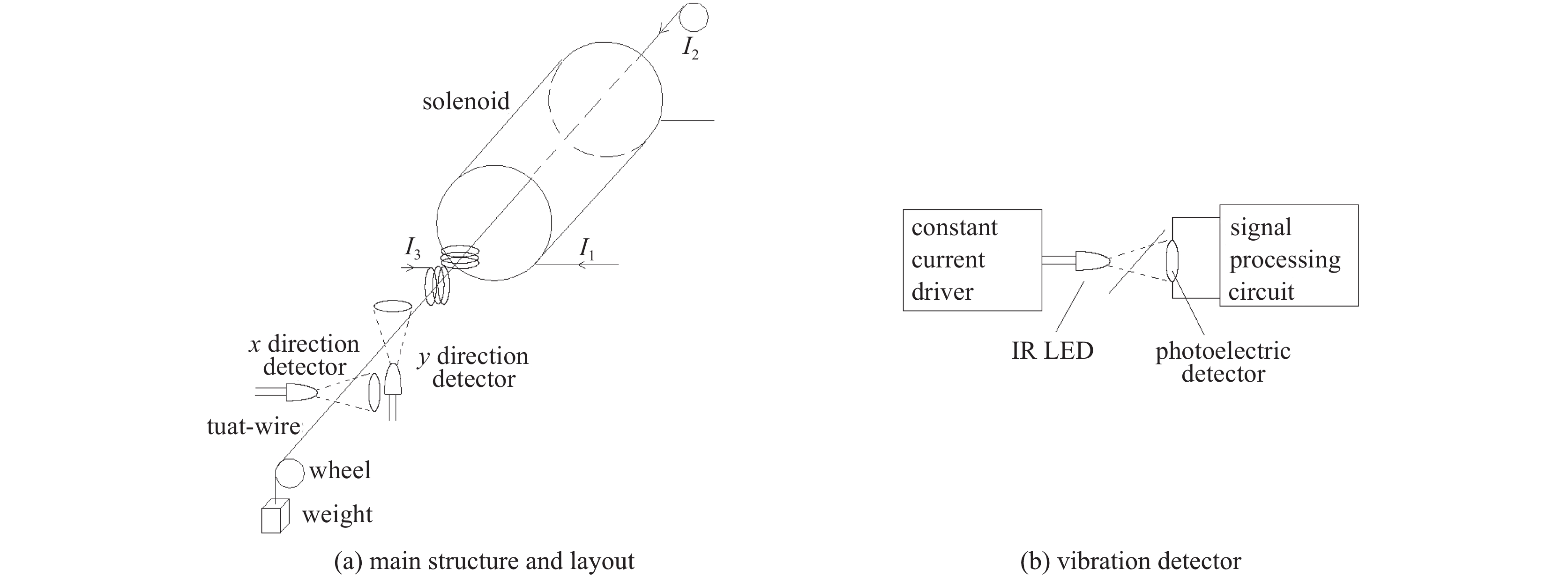
图1是基于悬丝法的螺线管线圈磁轴测量系统的基本构成,主要由两组相互垂直安装的光电探测器及其驱动与信号检测线路、两组相互垂直安装的线圈(亥姆霍兹线圈)及其驱动恒流源、一根直径约0.1 mm的金属悬丝线及其驱动电源、被测螺线管线圈及其驱动恒流源、数据采集用示波器等构成。
 图 1 悬丝法磁轴测量系统的主要构成及布局原理示意Figure 1. Main measurement system principle of magnetic axis of solenoid based on pulsed tuat-wire method
图 1 悬丝法磁轴测量系统的主要构成及布局原理示意Figure 1. Main measurement system principle of magnetic axis of solenoid based on pulsed tuat-wire method将金属悬丝线两端使用悬垂的重物将其绷紧并处于水平位置,并确保金属悬丝线处于两组光电探测器的中间位置(通过调节探测器达到)以及处于螺线管线圈的中心轴线位置(通过激光跟踪仪调节达到)。悬丝线加载低频脉冲电流,被测螺线管线圈也加载恒定电流,在螺线管内部产生磁场;当螺线管磁轴存在偏差时,即与悬丝线有一定的夹角时,则由于螺线管线圈产生的磁场横向分量(大致垂直于丝线)会使加载了电流的悬丝线受到一个横向洛伦兹力而产生机械振动,悬丝线的振幅与横向磁场分量沿轴向的积分值、悬丝线上电流脉冲的宽度和幅度成正比[7],通过测量悬丝线的振幅及悬丝线驱动电流、螺线管线圈工作电流等参数就可以通过计算而获得螺线管线圈的磁轴信息,包括偏移与倾角。
其中的关键设计包括悬丝线静止位置的调试与指示、光电探测器的恒定驱动、振动信号的提取与处理等。
2. 悬丝线振动位置信号的测量与处理关键原理
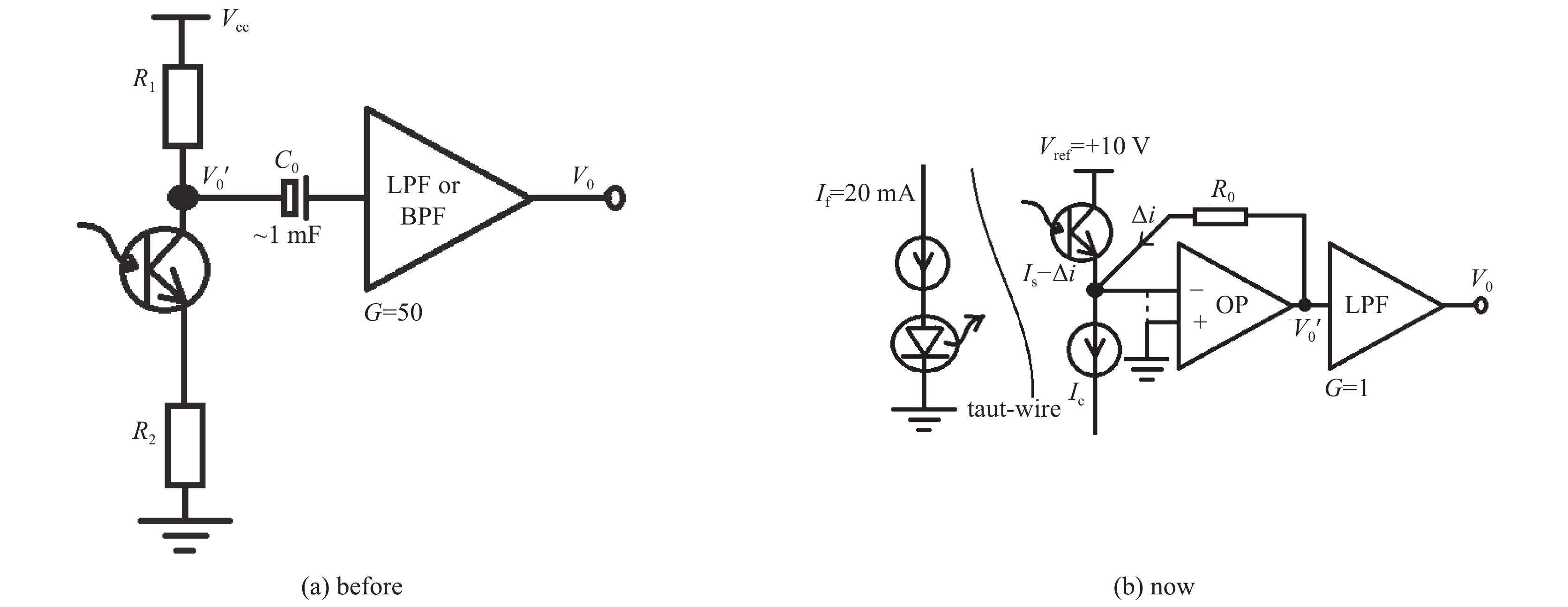
悬丝线振动信号测量原理如图2所示。悬丝线的振动位置探测器是测量系统中的一个主要部件,其作用是探测悬丝线的振动位置,主要由发光头(如红外发光二极管,IR LED)与接收头(如光电探测器,光电三极管或光电二极管)组成,其中发光头发射光线,接收头则接收照射在其上的光线并将接收的光线部分转换为电流信号,电流信号的大小与接收到的光信号强弱成正比,而光信号的强弱则与悬丝线的位置有关。发光头采用恒流电流驱动,以提高发光的稳定性,减少发光波动的影响。
 图 2 悬丝的振动位置信号探测原理Figure 2. Detection principle of vibration position signal of tuat-wire
图 2 悬丝的振动位置信号探测原理Figure 2. Detection principle of vibration position signal of tuat-wire在发光头与接收头之间放置一根悬丝线,悬丝线直径应阻挡大部分的光线,这样可以保证当悬丝线振动时能够获得明显变化的信号,有利于信号处理。光电探测器的静态工作电流在数mA的水平,当悬丝振动时,产生的电流变化10 μA左右或更小。通常的信号检测线路如图2(a)所示,在测量点处的直流偏置电压一般都在数伏的水平,而有效信号的变化幅度仅有数mV左右,因此,一般采用交流隔直放大器(或带通滤波器BPF)来对信号进行放大,放大倍数一般需要达到约50倍[5-6]或更大才可以获得具有明显差异的有效信号,而放大倍数的调节同时还会影响线路的带宽性能;由于驱动脉冲的频率为20 Hz左右,则要求耦合电容C0容量较大以对低频信号具有较好的耦合效果,但易产生低频基线信号的倾斜问题,使得磁轴倾斜与偏移信号耦合在一起,不利于信号的分离处理。改进工作也只是在滤波器的性能上进行[6],无论如何设计后继的滤波器电路,在低频端始终存在一个截止频率,不能获得直流偏置信号;由于该线路是基于对小信号变化的放大处理,其输出V0仅反映悬丝线振动过程中的振幅动态变化的情形,这样的测量线路在输出端不能获得悬丝线的静止位置信号,不利于悬丝线初始位置的调节,从而不能确切地知道悬丝线相对于探测器的位置。
在本测量系统中,采用了一种类似差分偏置消除的处理原理,如图2(b)所示。利用运算放大器输入端的虚地概念,为探测器的光接收端提供稳压工作电源Vref(+10 V),消除了输出信号变化对工作点的影响。选择负端输入偏置电流及漂移都较小的运算放大器,以降低对测量电流的影响;将运算放大器的负输入端作为信号汇流的节点,并另行提供一个电流吸收支路Ic,其上的电流可以抵消探测器较大的静态工作电流Is,从而使得R0上只有悬丝线振动时产生的微小信号电流Δi流过并在输出端产生一个较大的电压信号V0′(V0′=ΔiR0,由R0阻值决定)。信号的后继处理较简单,只需低通滤波处理或低放大倍数的放大即可,且放大倍数的调节一般不影响线路带宽性能,本测量线路中采用了基于多点反馈的切比雪夫低通滤波器,通带为2 kHz,带内波动0.3 dB,截止频率为6 kHz,带外衰减不小于50 dB。模拟结果显示:在这种测量线路原理中,悬丝的初始位置同时决定了线性测量的区域,并可以对此进行快速的调节,有利于提高测量效率。在这样的测量线路中,输出信号的幅度与两个因素有关:悬丝线的初始位置及电阻R0的阻值。悬丝线的初始位置直接影响振动信号幅度变化的大小,对信号有效变化范围产生影响;R0直接对变换电压输出信号幅度产生影响,R0阻值的改变不会对后继滤波器参数产生任何影响,有利于现场调试。由于输出信号是与探测器输出电流(包括变化部分)直接相关的,因此,该系统可以获得悬丝线的静态初始位置,在不借助其他高精度测量仪器的情况下有利于悬丝线的初始位置调节,从而提高测量效率。
3. 磁轴测量的典型结果及改善
3.1 测量典型波形
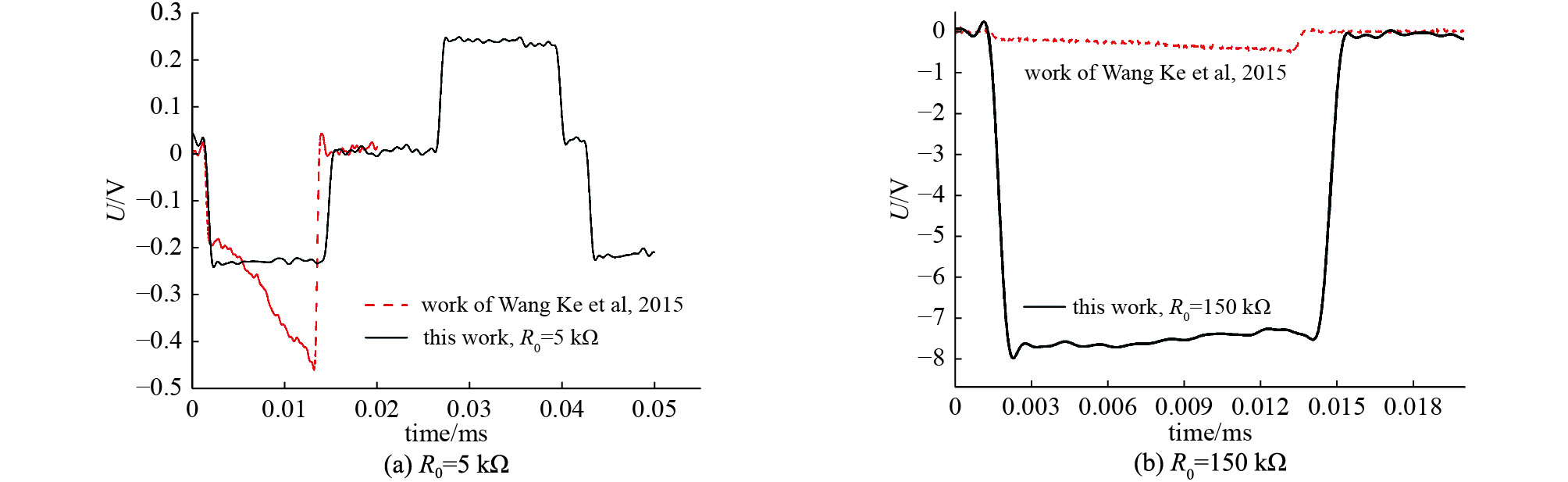
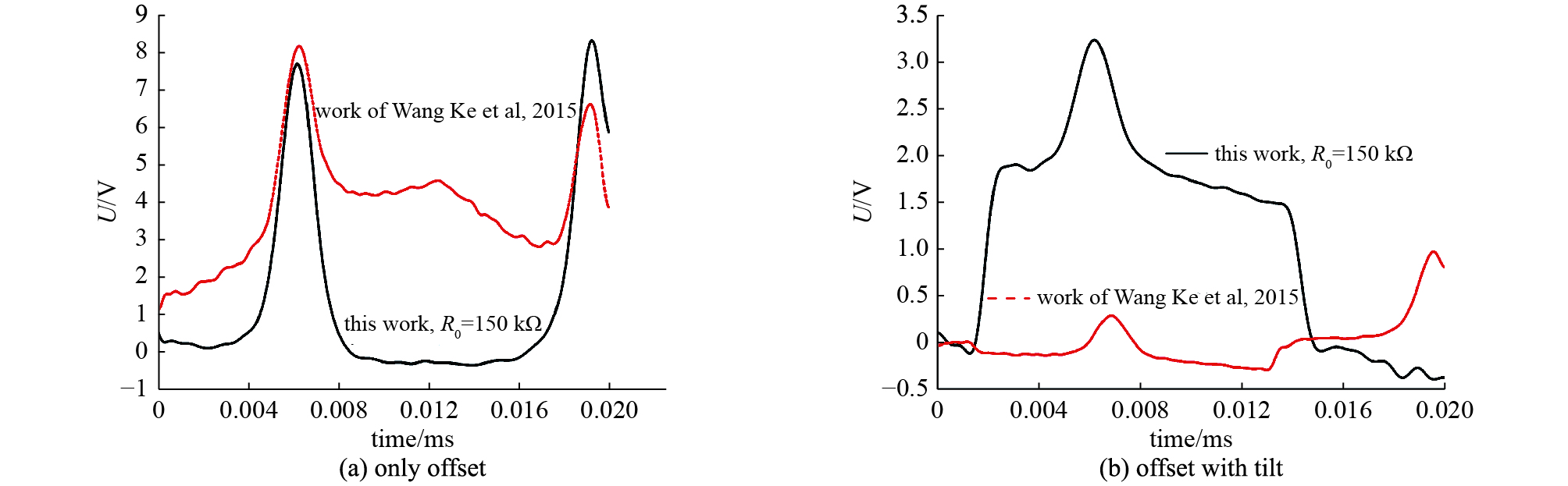
在同样的测量条件及环境下,由采用文献[6]的改进线路与本测量系统同时对悬丝振动进行对比测量,获得的磁轴倾斜测量波形如图3所示;明显地,在不同信号的水平下,本测量系统获得的有效信号都是相当平直的矩形波形或只具有相对较小的倾斜,与理论模拟结果比较一致[4],有利于信号的进一步处理。由文献[6]的改进线路测量获得的信号中,则存在较严重的基线倾斜,且有一定的扭曲情况,导致信号的数据处理具有一定的难度。
 图 3 磁轴倾斜测量波形及对比Figure 3. Measured waveform of tilt and its compare with the work of Wang Ke et al, 2015[6]
图 3 磁轴倾斜测量波形及对比Figure 3. Measured waveform of tilt and its compare with the work of Wang Ke et al, 2015[6]图3同时显示了R0对测量信号的作用。
图4则显示了获得的典型磁轴偏移的测量信号波形,包括了一个叠加在倾斜信号上的偏移信号波形。由于基线部分相对平直(对应倾斜信号),因此磁轴的偏移信号(山峰部分)更易于分辨与提取,可以提高测量的精度;而由文献[6]的改进线路测量获得的信号中,始终存在基线的较大起伏与明显倾斜,当偏移信号变小时,还可能不被识别,因此测量精度无法达到较高水平。
 图 4 磁轴偏移测量波形及对比Figure 4. Measured waveform of offset and its compare with the work of Wang Ke et al, 2015[6]
图 4 磁轴偏移测量波形及对比Figure 4. Measured waveform of offset and its compare with the work of Wang Ke et al, 2015[6]3.2 测量结果及分辨力
利用磁轴测量数据处理方法,对磁轴偏移及倾斜测量分辨力进行了实际测量研究。通过专门设计的螺线管线圈支撑机构,可以对螺线管线圈的磁轴方位(包括了偏移与倾斜)进行调节。在不对螺线管线圈初始状态进行精确测量的情况下,通过调节螺线管线圈的偏移增量或倾斜增量的方法来达到改变螺线管线圈磁轴方位的效果,对每次增量调节后的螺旋管磁轴方位进行测量,对测量数据进行处理获得相关测量结果。
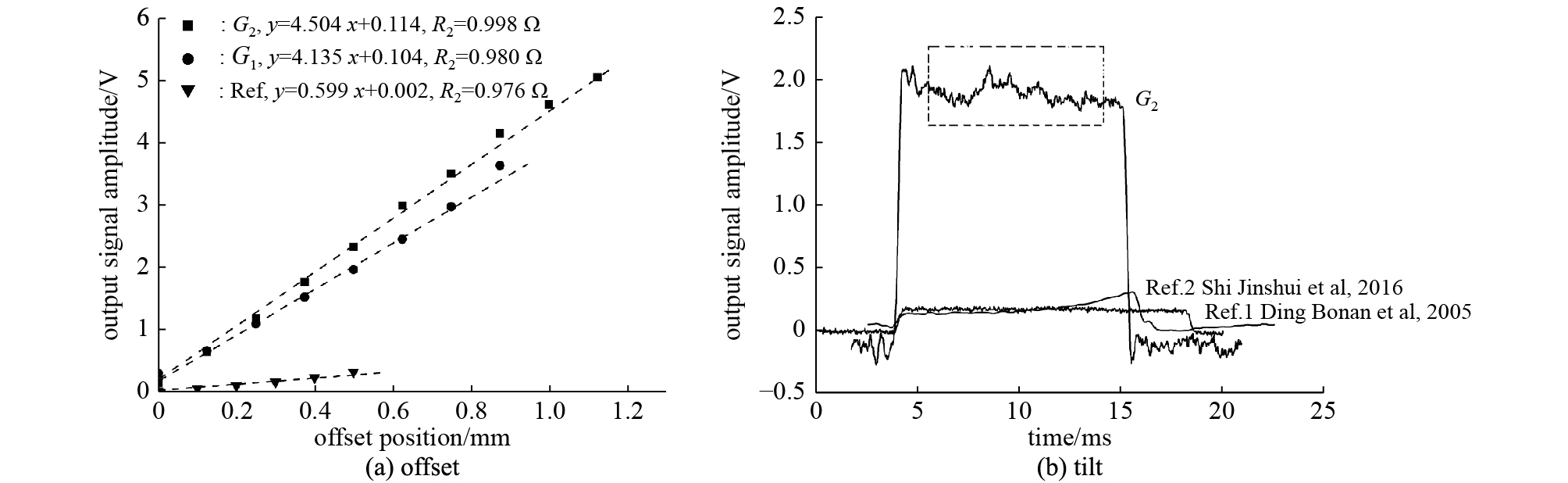
图5显示了磁轴偏移及标定信号的测量结果,及与原测量系统测量信号的比对。
 图 5 典型测试结果Figure 5. Typical results of offset measurement sensitivity and tilt scale with diffferent gains (G1 and G2)
图 5 典型测试结果Figure 5. Typical results of offset measurement sensitivity and tilt scale with diffferent gains (G1 and G2)在磁轴偏移的测试中,针对两种增益条件下(G1及G2)的系统测量性能进行了测试研究。测试灵敏度分别为4.50 V/mm,4.13 V/mm,且测试的线性度(图中的R2项表示)在较高的增益情况下也同样有一定的提高,验证了增益对测量结果的调节功能,而原系统的灵敏度为0.60 V/mm,如图5(a)所示,且调节不便。
在磁轴倾斜的标定系数测试中,可以获取图5(b)中虚线框内数据的平均值,然后扣除基线的均值即可得到标定的灵敏度。在标定测试中,亥姆霍兹线圈的工作电流为200 mA,对于本研制系统(G2),标定信号的输出幅度约2 V,因此其灵敏度约为10 mV/mA;而原系统则展现了两种测试情况(Ref.1及Ref.2)的结果,灵敏度水平约为1 mV/mA。
4. 测量系统进一步的改进措施
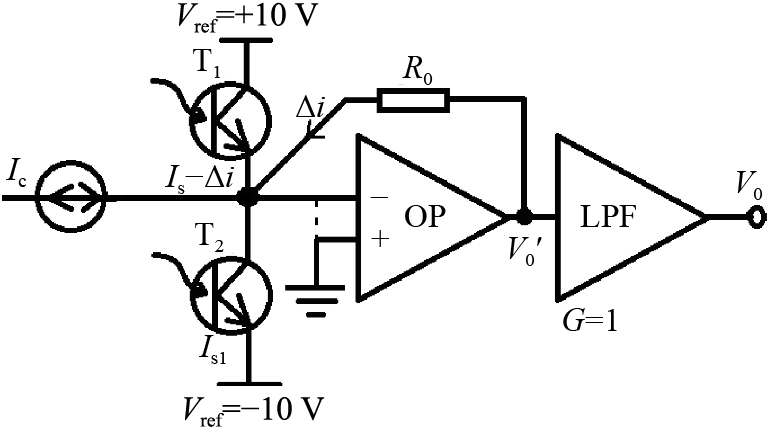
针对环境光照条件变化及温度漂移、时间漂移等对光电探测器的影响,可以在探测器的应用结构上进行一定改进,如图6所示。
 图 6 测量信号处理的改进措施示意Figure 6. Potential improvement for reducing influence from environment light
图 6 测量信号处理的改进措施示意Figure 6. Potential improvement for reducing influence from environment light假设T1用于悬丝振动测量,T2用于补偿,则T2仅需与T1处于相同的工作环境即可;此时,T1的静态电流Is与T2的静态电流Is1应该可以相消,包括漂移性能,这种形式同时可以在一定程度上抵消探测器漂移包括环境光线变化带来的问题。但可能存在器件性能离散性的因素,而导致电流并不能完全相消,此时可以再增加一个电流强度及方向均可以调节的恒流源Ic用于抵消这一部分的电流,这样就可以获得对纯粹微小信号进行处理的能力。
这种能力对于解决测量信号缓慢漂移的问题具有较大作用,从而提高参考信号获取的质量,有利于信号的进一步处理。
5. 结 论
基于输出信号需要直接反映悬丝线位置信号的测量要求,根据光电探测器的工作原理,采用了一种在较高直流信号偏置下可以完成工作点偏置电流抵消的关键线路,不仅可以获得悬丝线初始静态位置及线性测量区域的调节能力,提高了测量系统调试的效率,而且确保成功地提取了叠加在悬丝振动信号上的小信号用于放大,解决了单纯放大无法获得较大有效测量信号幅度的难题,进而获得幅度可观的磁轴偏置及倾斜测量信号,同时也解决了测量基线倾斜与起伏对信号处理的严重影响问题,最终获得了约4.5 V/mm的磁轴偏移测量灵敏度及约10 mV/mA的磁轴倾斜测量灵敏度,将螺线管线圈的磁轴测量灵敏度提高约1个量级,同时,测量系统具有调试方便、工作效率高的特点。
-
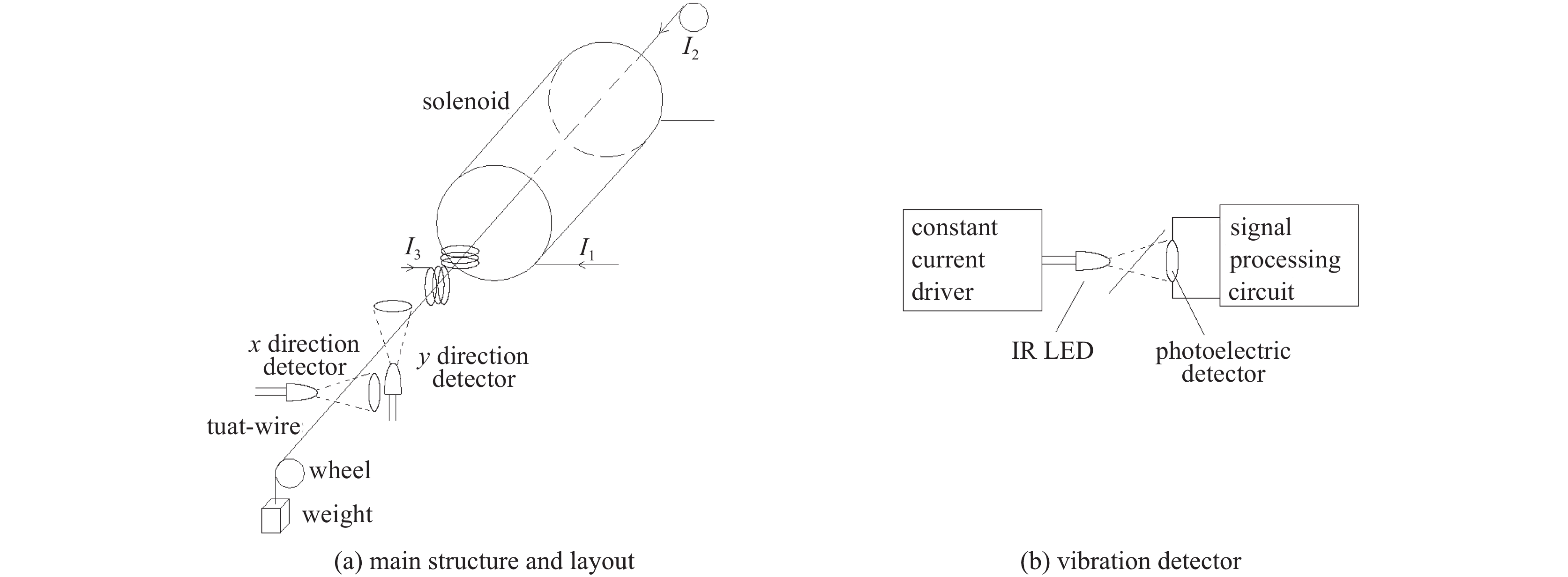
图 1 悬丝法磁轴测量系统的主要构成及布局原理示意
Figure 1. Main measurement system principle of magnetic axis of solenoid based on pulsed tuat-wire method
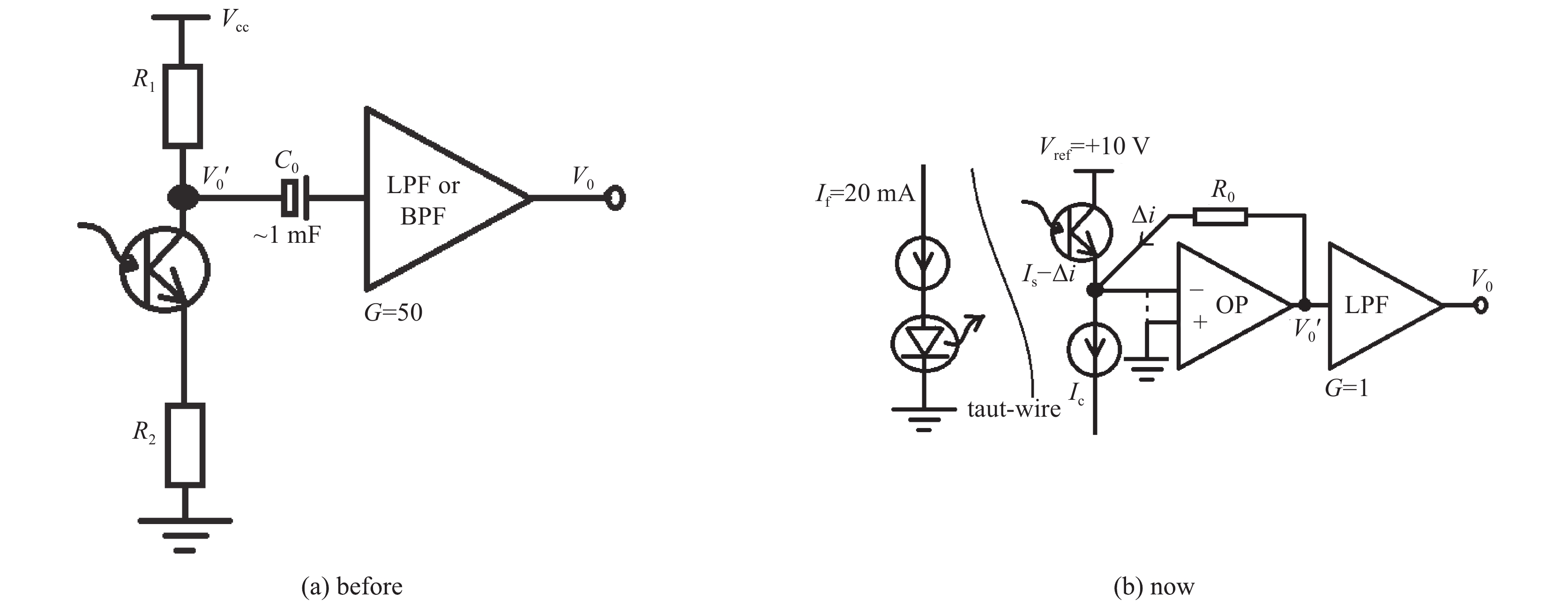
图 2 悬丝的振动位置信号探测原理
Figure 2. Detection principle of vibration position signal of tuat-wire
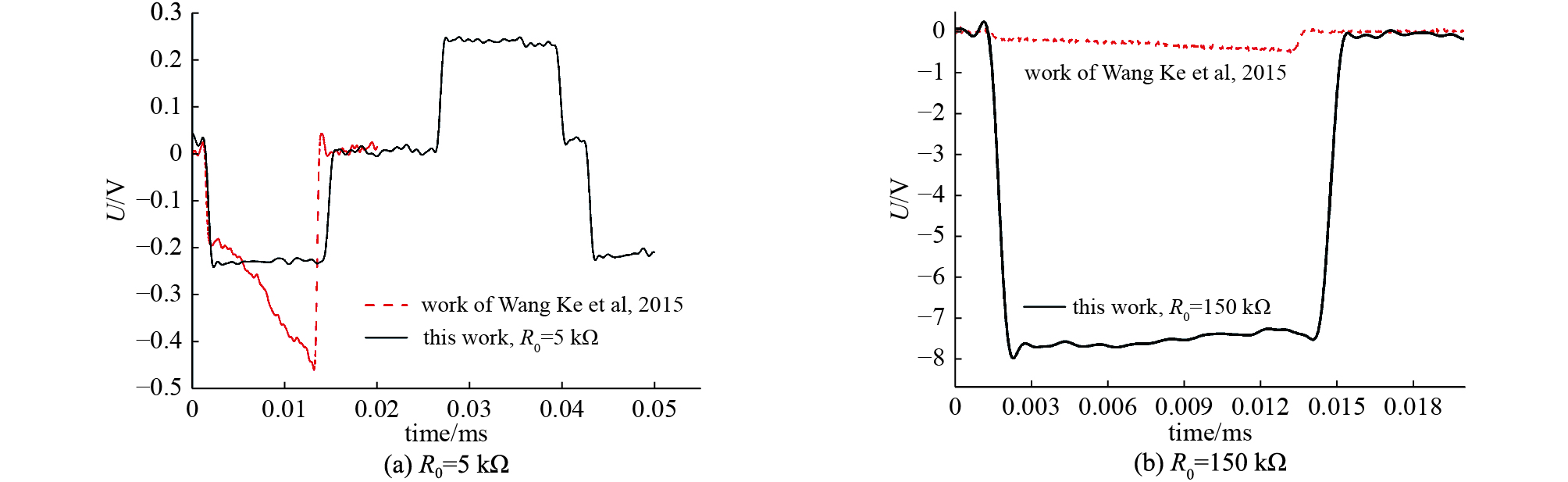
图 3 磁轴倾斜测量波形及对比
Figure 3. Measured waveform of tilt and its compare with the work of Wang Ke et al, 2015[6]
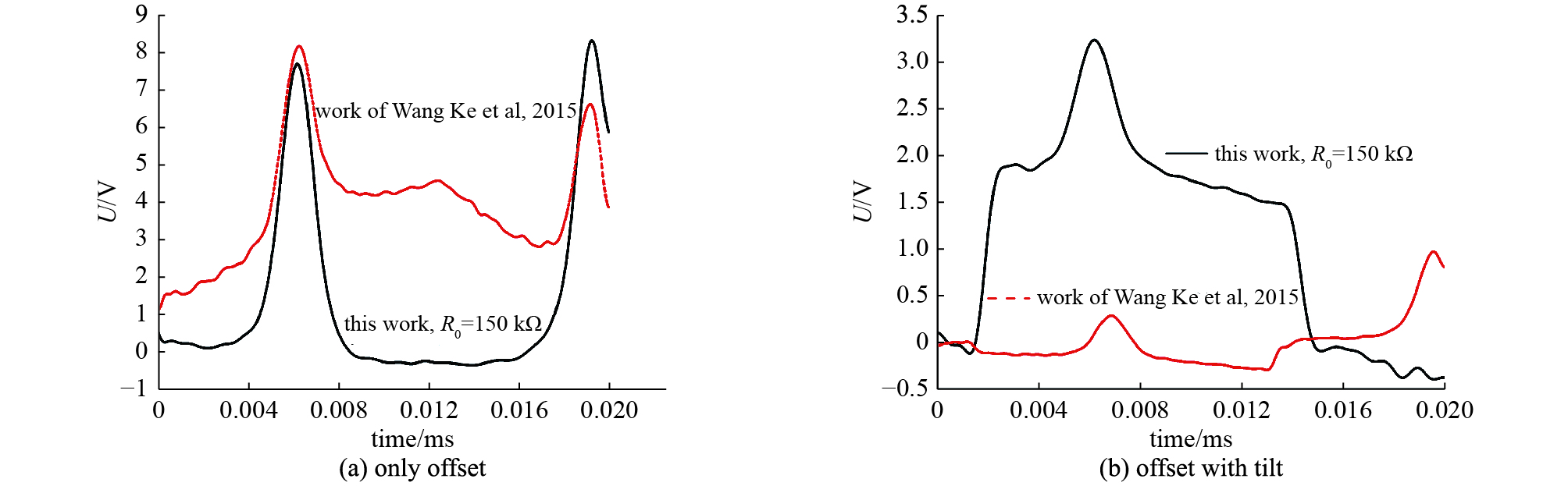
图 4 磁轴偏移测量波形及对比
Figure 4. Measured waveform of offset and its compare with the work of Wang Ke et al, 2015[6]
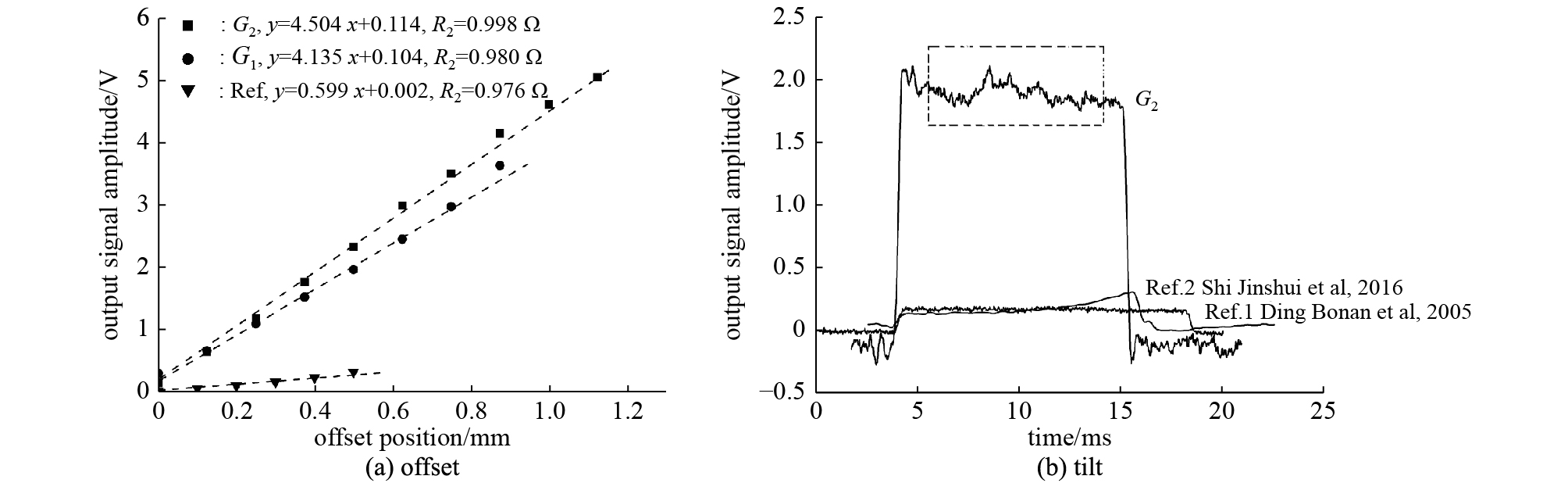
图 5 典型测试结果
Figure 5. Typical results of offset measurement sensitivity and tilt scale with diffferent gains (G1 and G2)
-
[1] 丁伯南, 邓建军, 王华岑, 等. “神龙一号”直线感应电子加速器[J]. 高能物理与核物理, 2005, 29(6):604-610. (Ding Bonan, Deng Jianjun, Wang Huacen, et al. Dragon-I linear induction electron accelerator[J]. High Energy Physics and Nuclear Physics, 2005, 29(6): 604-610 doi: 10.3321/j.issn:0254-3052.2005.06.015 [2] 石金水, 邓建军, 章林文, 等. 神龙二号加速器及其关键技术[J]. 强激光与粒子束, 2016, 28:010201. (Shi Jinshui, Deng Jianjun, Zhang Linwen, et al. Dragon - II accelerator and its key technology[J]. High Power Laser and Particle Beams, 2016, 28: 010201 doi: 10.11884/HPLPB201628.010201 [3] Melton J G, Burns M J, Honaberger D J. Pulsed taut-wire measurement of the magnetic alignment of the ITS induction cells[C]// Proceedings of Particle Accelerator Conference. 1991. [4] Bonnafond C, Villate D. Alignment techniques for the high current AIRIX accelerator[C]//Proceedings of Particle Accelerator Conference. 1999, 2: 1381-1383. [5] 章文卫, 李洪, 王华岑, 等. 采用脉冲悬丝法测量强流加速腔聚焦场磁轴[J]. 强激光与粒子束, 1996, 8(2):203-208. (Zhang Wenwei, Li Hong, Wang Huacen, et al. Pulsed wire magnetic field alignment measurements on a high current induction cell[J]. High Power Laser and Particle Beams, 1996, 8(2): 203-208 [6] 王科, 代志勇, 廖树清, 等. 用于线圈磁轴测量的滤波放大电路的设计改进[J]. 太赫兹科学与电子信息学报, 2015, 13(5):775-778. (Wang Ke, Dai Zhiyong, Liao Shuqing, et al. Design and improvement of filter circuit for solenoid magnet axis measurement[J]. Journal of Terahertz Science and Electronic Information Technology, 2015, 13(5): 775-778 doi: 10.11805/TKYDA20150518.775 [7] Arbelaez D, Kwan J W, Lipton T M, et al. Magnetic alignment of pulsed solenoids using the pulsed wire method[C]// Proceedings of Particle Accelerator Conference. 2011: 2087-2089. -

 下载:
下载:
 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1215
- HTML全文浏览量: 352
- PDF下载量: 33
- 被引次数: 0
