

Design and implementation of vacuum control system of China Spallation Neutron Source
-
摘要: 中国散裂中子源(CSNS)加速器真空控制系统负责真空数据采集、设备监控和闸板阀控制与联锁,是设备运行和故障诊断以及超高真空保持的重要保障。本文介绍了加速器真空需求,基于实验物理及工业控制系统EPICS软件框架的真空控制系统设计与实现,使用横河可编程逻辑控制器PLC控制与联锁设备,摩莎MOXA工控机监测真空状态,EPICS PV数据直接进入声音报警系统和历史数据库系统,为工作人员及时发现和处理问题、进行后续数据分析和机器研究等提供了便捷途径和可靠保障。目前,该系统已完成现场安装和调试,并已正式投入运行。运行结果表明,该系统具有稳定性好、可靠性高、人机交互友好的特点,很好地满足了加速器真空控制系统运行的需要。
-
关键词:
- 中国散裂中子源 /
- 超高真空 /
- 真空控制系统 /
- 实验物理及工业控制系统
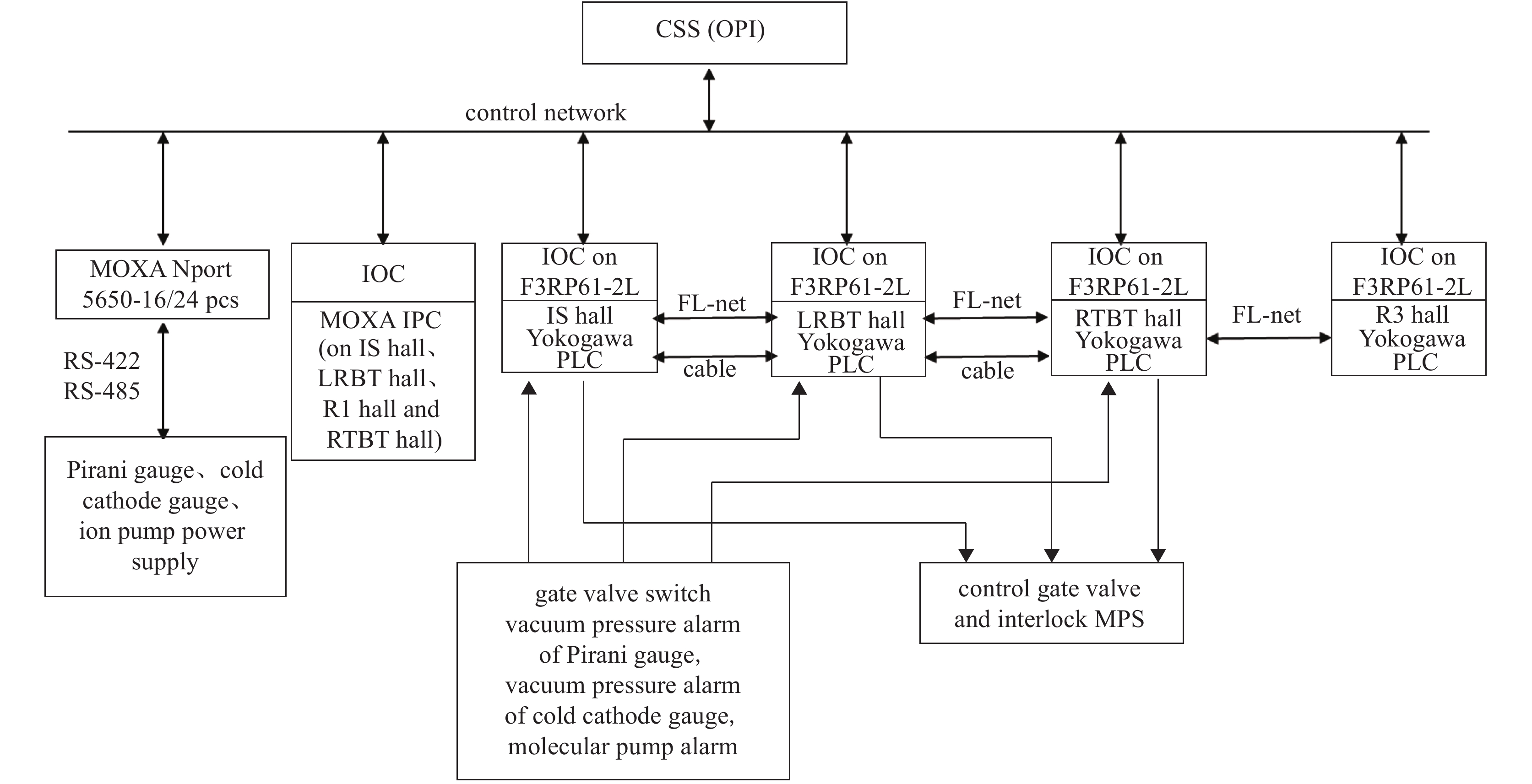
Abstract: The accelerator vacuum control system of China Spallation Neutron Source (CSNS) is designed to be responsible for vacuum data acquisition, equipment monitoring and gate valve control and interlock, which is an important guarantee for safe operation, fault diagnosis and ultra-high vacuum. This paper introduces the vacuum requirements of the accelerator, and the vacuum control system design and implementation. Based on the experimental physics and industrial control system (EPICS) software framework, the Yokogawa PLC is used to control and interlock equipment, the MOXA IPC monitors the vacuum status, the EPICS PV data directly enters the BEAST alarm server and the channel archiver, providing convenience and reliable guarantee for the staff to discover and solve problems in time, as well as carry out subsequent data analysis and machine research. At present, the vacuum control system has been installed and debugged on site, and has been put into operation. The results show that the system has the characteristics of high stability, high reliability and friendly operator interface, which satisfies the operational needs. -
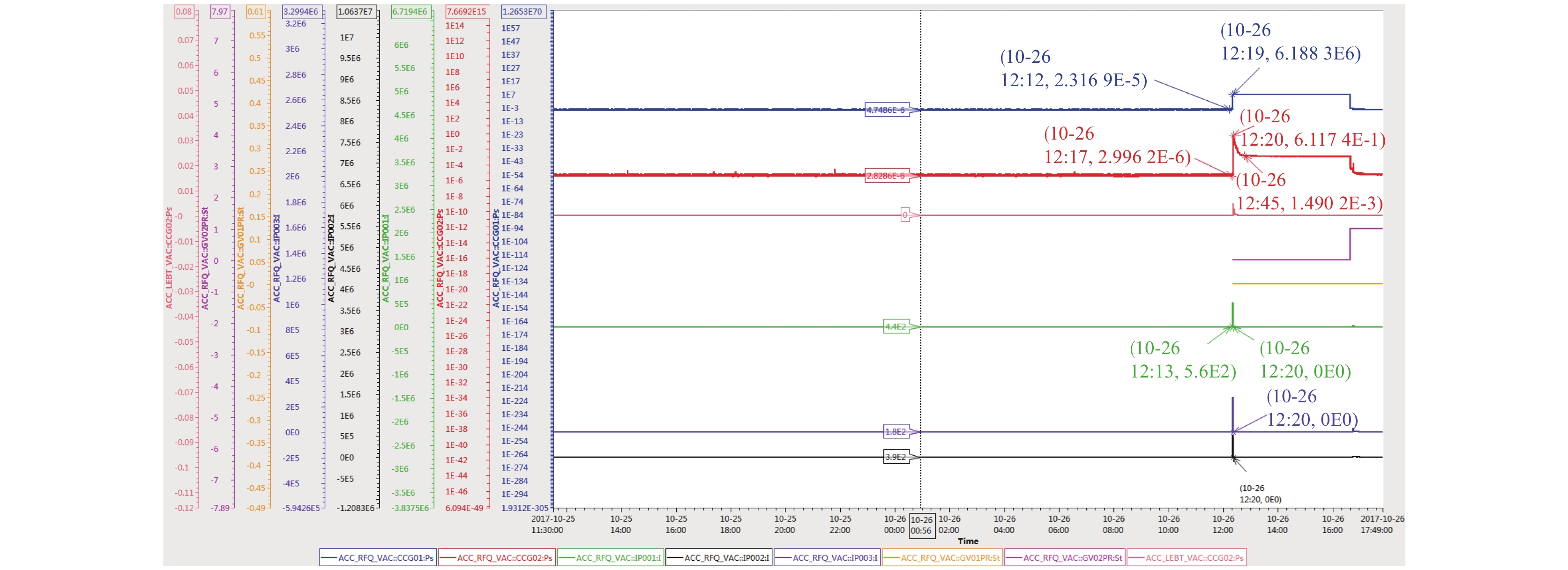
图 6 RFQ区间真空规、离子泵电源电流和闸板阀状态历史曲线
Figure 6. Curve of history inquiries for vacuum gauge, ion pump power and valve status of RFQ
表 1 加速器真空环境需求表
Table 1. Requirements of vacuum system
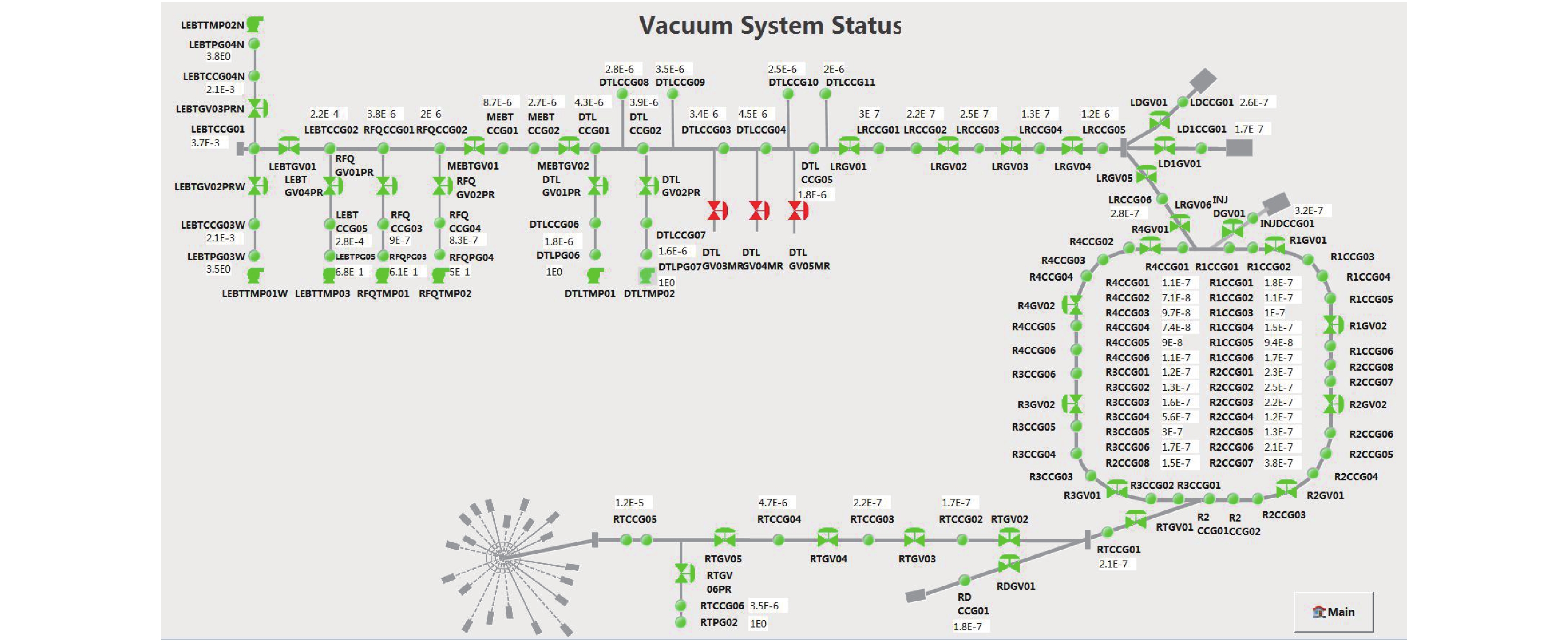
accelerator vacuum degree/ Pa ion source(IS)low energy beam transport line(LEBT) 2.0×10−3 radio frequency quadrupole(RFQ) 1.0×10−5 medium energy beam transport line(MEBT) 1.0×10−5 drift tube linac(DTL) 1.0×10−5 linac to ring beam transport line(LRBT) 1.0×10−5 rapid cycling synchrotron(RCS) 5.0×10−6 ring to target beam transport line(RTBT) 1.0×10−5  下载: 导出CSV
下载: 导出CSV
表 2 真空系统主要设备统计
Table 2. The vacuum system devices
device molecular pump ion pump gauge valve quantity 7 147 30 34
下载: 导出CSV
表 3 真空数据电气接口表
Table 3. Serial ports of vacuum system
device model quantity analog interface COM TPG-300 54 not used RS-422 MKS 937B 9 used not used ion pump power supply 147 none RS-485
下载: 导出CSV
表 4 其他系统设备真空压力联锁信号
Table 4. Interlock signals of other systems
system ion source power supply linac RF DTL quantity 2 10 4 9
下载: 导出CSV
-
[1] Wei Jie, Chen Hesheng, Chen Yanwei, et al. China Spallation Neutron Source: Design, R&D, and outlook[J]. Nuclear Instruments & Methods in Physics Research Section A—Accelerators Spectrometers Detectors and Associated Equipment, 2009, 600(1): 10-13. [2] Wei Jie, Fu Shinian, Tang Jingyu, et al. China Spallation Neutron Source—An overview of application prospects[J]. Chinese Physics C, 2009, 33(11): 1033-1042. doi: 10.1088/1674-1137/33/11/021 [3] Wang Sheng, Fang Shouxian, Fu Shinian, et al. Introduction to the overall physics design of CSNS accelerators[J]. Chinese Physics C, 2009, 33(S2): 1-3. doi: 10.1088/1674-1137/33/S2/001 [4] 刘华昌, 彭军, 巩克云, 等. 中国散裂中子源漂移管直线加速器研制进展[J]. 原子能科学技术, 2015, 49(S2):556-559. (Liu Huachang, Peng Jun, Gong Keyun, et al. DTL construction status of China Spallation Neutron Source[J]. Atomic Energy Science and Technology, 2015, 49(S2): 556-559 [5] 董海义, 宋洪, 李琦, 等. 中国散裂中子源(CSNS)真空系统研制[J]. 真空, 2015(4):1-6. (Dong Haiyi, Song Hong, Li Qi, et al. Research and development of vacuum system for China Spallation Neutron Source[J]. Vacuum, 2015(4): 1-6 [6] 黄涛, 董海义, 王鹏程, 等. CSNS离子泵性能测试[J]. 真空, 2017(6):43-46. (Huang Tao, Dong Haiyi, Wang Pengcheng, et al. Performance test of CSNS ion pump[J]. Vacuum, 2017(6): 43-46 [7] 王鹏程, 黄涛, 刘佳明, 等. 中国散裂中子源(CSNS)LRBT输运线真空系统[J]. 真空, 2019(5):21-25. (Wang Pengcheng, Huang Tao, Liu Jiaming, et al. The vacuum system of LRBT at CSNS[J]. Vacuum, 2019(5): 21-25 [8] 李刚, 赵籍九, 陈伯飞, 等. BEPCⅡ储存环真空控制系统[J]. 原子能科学技术, 2010(4):504-507. (Li Gang, Zhao Jijiu, Chen Bofei, et al. Vacuum control system of BEPCⅡ storage ring[J]. Atomic Energy Science and Technology, 2010(4): 504-507 [9] 何泳成, 王春红, 王金灿, 等. 基于嵌入式IOC的CSNS真空控制系统样机研制[J]. 核电子学与探测技术, 2013(3):280-283. (He Yongcheng, Wang Chunhong, Wang Jincan, et al. Development of a prototype vacuum control system based on embedded IOC for CSNS[J]. Nuclear Electronics & Detection Technology, 2013(3): 280-283 doi: 10.3969/j.issn.0258-0934.2013.03.004 [10] 赵籍九, 尹兆升. 粒子加速器技术[M]. 北京: 高等教育出版社, 2006.Zhao Jijiu, Yin Zhaosheng. Particle accelerator technology[M]. Beijing: Higher Education Press, 2006 [11] 吴煊, 王春红, 王金灿, 等. 基于Modbus RS232的数字电源控制器的远控设计与实现[J]. 核电子学与探测技术, 2012(8):867-870. (Wu Xuan, Wang Chunhong, Wang Jincan, et al. The design and implementation of the remote control of a digital power supply control module based on Modbus/RS232[J]. Nuclear Electronics & Detection Technology, 2012(8): 867-870 doi: 10.3969/j.issn.0258-0934.2012.08.001 [12] 张玉亮. 基于StreamDevice的VME机箱监测及其应用研究[J]. 核电子学与探测技术, 2014:834-836. (Zhang Yuliang. Study of StreamDevice based VME chassis monitoring and its implementation[J]. Nuclear Electronics & Detection Technology, 2014: 834-836 doi: 10.3969/j.issn.0258-0934.2014.07.007 [13] 何泳成, 李刚, 康明涛, 等. CSNS反角白光中子源束线控制系统研制[J]. 强激光与粒子束, 2018, 30:114006. (He Yongcheng, Li Gang, Kang Mingtao, et al. Development of CSNS white neutron source beam line control system[J]. High Power Laser and Particle Beams, 2018, 30: 114006 doi: 10.11884/HPLPB201830.180193 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1433
- HTML全文浏览量: 418
- PDF下载量: 77
- 被引次数: 0
