

A phase stereo matching method based on integrated epipolar line using binocular structured light
-
摘要: 针对双目结构光三维重建中的相位立体匹配效率较低问题,提出了一种极线近似的快速匹配方法。首先依据两相机光心与左像素形成平面与右成像平面交线对极线进行描述;对每行像素中部分区域的对应极线进行近似,结合立体视觉的连续性约束,使得孤立的沿各自极线搜索匹配相位改为区域内沿近似极线连续搜索匹配相位;同时结合双目相机位姿特性,实现全局均匀分区,避免针对每行数据重复分区;计算过程中采用查表法辅助计算。实验结果表明,立体匹配后获得点云平均误差为0.436 mm,属可接受误差范围内,立体匹配计算速度平均提升10.18倍,对640×480尺寸图像可在17 ms内完成立体匹配,可应用于结构光实时三维重建。Abstract: For the low efficiency of phase stereo matching in binocular structured light 3D reconstruction, a fast matching method with polar line approximation is proposed. Firstly, the polar lines are described based on the intersection line between the optical centers of the two cameras and the left pixel forming plane and the right imaging plane; the corresponding polar lines of some regions in each row of pixels are approximated, and the continuity constraint of stereo vision is combined, so that the isolated search for matching phase along the respective polar lines is replaced by the continuous search for matching phase along the approximate polar lines in the region; meanwhile, the global uniform partitioning is realized by combining the bit pose characteristics of binocular cameras to avoid repeated partitioning for each row of pixels; the calculation is assisted by the table look-up method. The global uniform partitioning is combined with the binocular camera pose characteristics to avoid repeated partitioning for each row of data. The experiments show that the average error of the point cloud obtained after stereo matching is 0.436 mm, which is within the acceptable error range, and the average speed of stereo matching calculation is increased by 10.18 times.
-
Key words:
- epipolar geometry /
- stereo matching /
- 3D reconstruction /
- binocular structured light /
- phase matching
-

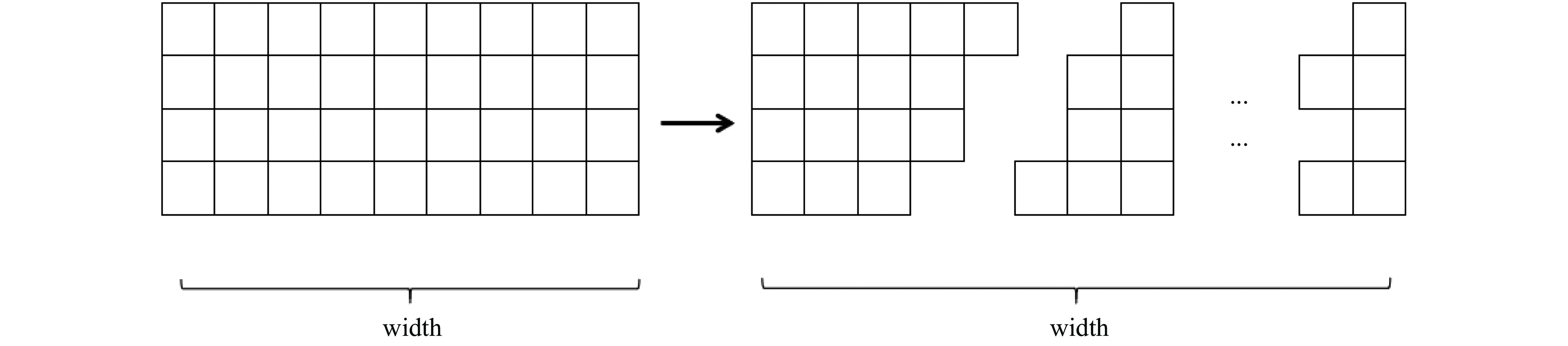
图 4 水平相移条纹图像使得相位单调方向与极线方向一致
Figure 4. Horizontal phase shift fringe align with the phase monotonicity direction and epipolar line of phase image
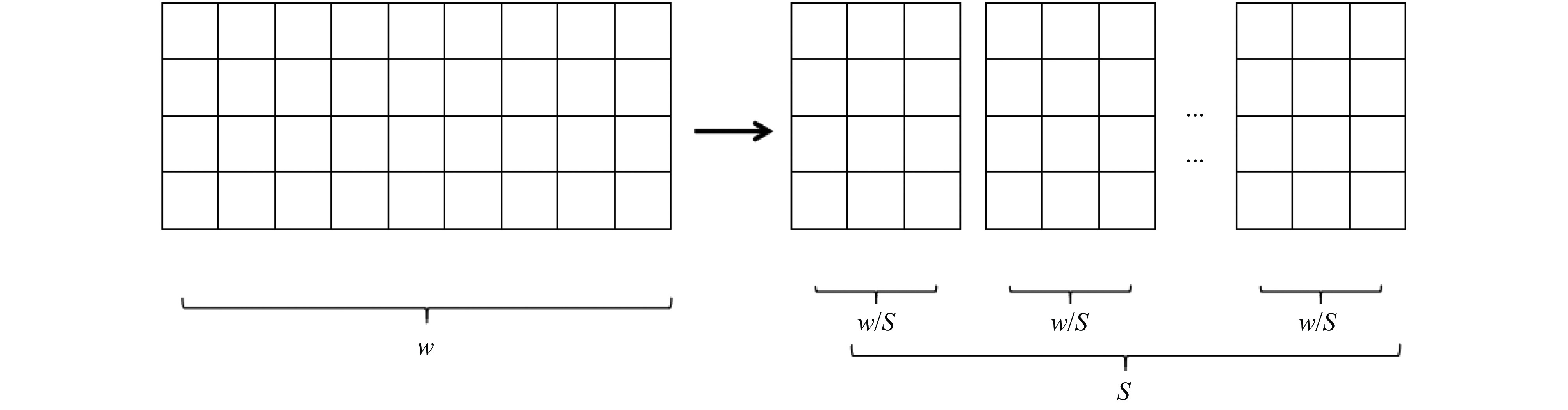
图 6 极线区域分段示意图
Figure 6. The region divided by integrated epipolar line using unified partitioning policy
表 1 不同分辨率匹配时间对比
Table 1. Matching time spent comparison of different resolution
resolution original time spent/s improved time spent/s enhancing rate 640×480 0.223 0.017 12.72 1280×1024 1.008 0.109 9.29 2448×2048 3.256 0.324 10.05  下载: 导出CSV
下载: 导出CSV
表 2 不同场景匹配时间对比
Table 2. Matching time spent comparison of different scene
resolution original time spent/s improved time spent/s enhancing rate wall 0.250 0.031 8.06 scene 1 0.223 0.017 12.72 scene 2 0.156 0.016 9.75
下载: 导出CSV
表 3 不同分辨率重建点云差分对比
Table 3. Difference of 3D reconstruction point cloud of different resolution
resolution average/mm standard deviation/mm 640×480 0.436 0.316 1280×1024 0.339 0.296 2448×2048 0.221 0.346
下载: 导出CSV
-
[1] Sebastian T, Puthiyidam J J. A survey on video summarization techniques[J]. International Journal of Computer Applications, 2015, 132(13): 31-33. [2] Sadeghi H, Moallem P, Monadjemi S A. Feature based dense stereo matching using dynamic programming and color[J]. International Journal of Computational Intelligence, 2004, 4(3): 179-186. [3] 何人杰. 双目立体视觉区域局部匹配算法的改进及其实现[J]. 现代电子技术, 2009, 32(12):68-70 doi: 10.3969/j.issn.1004-373X.2009.12.023He Renjie. Improvement of regional related match algorithm for binocular stereo vision and its implementation[J]. Modern Electronics Technique, 2009, 32(12): 68-70 doi: 10.3969/j.issn.1004-373X.2009.12.023 [4] Scharstein D, Szeliski R. High-accuracy stereo depth maps using structured light[C]//Proceedings of 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. 2003: 195-202. [5] Yoon K J, Kweon I S. Adaptive support-weight approach for correspondence search[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28(4): 650-656. doi: 10.1109/TPAMI.2006.70 [6] Liu Kai, Wang Yongchang. Phase channel multiplexing pattern strategy for active stereo vision[C]//Proceedings of 2012 International Conference on 3D Imaging (IC3D). 2012: 1-8. [7] Scharstein D, Szeliski R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms[J]. International Journal of Computer Vision, 2002, 47(1): 7-12. [8] Wang Yongchang, Liu Kai, Hao Qi, et al. Robust active stereo vision using Kullback-Leibler divergence[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(3): 548-563. doi: 10.1109/TPAMI.2011.162 [9] 孙进, 马煜中, 杨晗, 等. 结构光三维测量非线性相位误差主动校正法[J]. 仪表技术与传感器, 2019(10):117-121,126 doi: 10.3969/j.issn.1002-1841.2019.10.026Sun Jin, Ma Yuzhong, Yang Han, et al. Active correction of nonlinear phase error for structural light three-dimensional measurement[J]. Instrument Technique and Sensor, 2019(10): 117-121,126 doi: 10.3969/j.issn.1002-1841.2019.10.026 [10] 肖志涛, 卢晓方, 耿磊, 等. 基于极线校正的亚像素相位立体匹配方法[J]. 红外与激光工程, 2014, 43(s1):225-230Xiao Zhitao, Lu Xiaofang, Geng Lei, et al. Sub-pixel matching method based on epipolar line rectification[J]. Infrared and Laser Engineering, 2014, 43(s1): 225-230 [11] 关芳芳, 程筱胜. 基于极线校正的相移结构光三维测量[J]. 南京工程学院学报(自然科学版), 2014, 12(2):9-13Guan Fangfang, Cheng Xiaosheng. Three-dimensional measurement using phase moving structured light based on epipolar line rectification[J]. Journal of Nanjing Institute of Technology (Natural Science Edition), 2014, 12(2): 9-13 [12] Zhao Huijie, Li Jianjie. Stereo image matching based on phase unwrapping[C]//Proceedings of SPIE 5253, Fifth International Symposium on Instrumentation and Control Technology. 2003: 394-397. [13] 赵成星, 杨宇, 张晓玲. 光栅四步相移法的三维重建[J]. 激光杂志, 2020, 41(10):34-38Zhao Chengxing, Yang Yu, Zhang Xiaoling. Three-dimensional reconstruction of grating four-step phase shift method[J]. Laser Journal, 2020, 41(10): 34-38 [14] 陈玲, 邓文怡, 娄小平. 基于多频外差原理的相位解包裹方法[J]. 光学技术, 2012, 38(1):73-78 doi: 10.3788/GXJS20123801.0073Chen Ling, Deng Wenyi, Lou Xiaoping. Phase unwrapping method base on multi-frequency interferometry[J]. Optical Technique, 2012, 38(1): 73-78 doi: 10.3788/GXJS20123801.0073 [15] 陈松林, 赵吉宾, 夏仁波. 多频外差原理相位解包裹方法的改进[J]. 光学学报, 2016, 36:01412004Chen Songlin, Zhao Jibin, Xia Renbo. Improvement of the phase unwrapping method based on multi-frequency heterodyne principle[J]. Acta Optica Sinica, 2016, 36: 01412004 [16] 黄亚楠, 娄小平. 基于多频外差原理的相位校正及匹配方法研究[J]. 应用光学, 2014, 35(2):237-241Huang Yanan, Lou Xiaoping. Phase correction and matching based on multi-frequency heterodyne method[J]. Journal of Applied Optics, 2014, 35(2): 237-241 [17] 肖丹, 陈良洲, 干江红. 基于数字光栅相移法的三维重构[J]. 光电技术应用, 2011, 26(5):17-20 doi: 10.3969/j.issn.1673-1255.2011.05.007Xiao Dan, Chen Liangzhou, Gan Jianghong. 3D reconstruction based on digital grating phase-shifting[J]. Electro-Optic Technology Application, 2011, 26(5): 17-20 doi: 10.3969/j.issn.1673-1255.2011.05.007 [18] Liu Kai, Song Jianwen, Lau D L, et al. Reconstructing 3D point clouds in real time with look-up tables for structured light scanning along both horizontal and vertical directions[J]. Optics Letters, 2019, 44(24): 6029-6032. doi: 10.1364/OL.44.006029 [19] Hartley R, Zisserman A. Multiple view geometry in computer vision[M]. 2nd ed. Cambridge: Cambridge University Press, 2003. [20] 陈至坤, 胡连军, 王一, 等. 单圆位姿识别二义性的矩形约束消除[J]. 激光与光电子学进展, 2017, 54:101501Chen Zhikun, Hu Lianjun, Wang Yi, et al. Solution of duality in pose estimation of a single circle using rectangle constrain[J]. Laser & Optoelectronics Progress, 2017, 54: 101501 期刊类型引用(1)
1. 黄智峰,徐波. 聚氨酯合成革材料的制备及其在运动鞋中的应用. 中国皮革. 2022(11): 108-112 .  百度学术
百度学术其他类型引用(0)
-

 点击查看大图
点击查看大图

计量
- 文章访问数: 1319
- HTML全文浏览量: 471
- PDF下载量: 122
- 被引次数: 1
