

Inverse calculation of achromatic Risley prism based on neural network
-
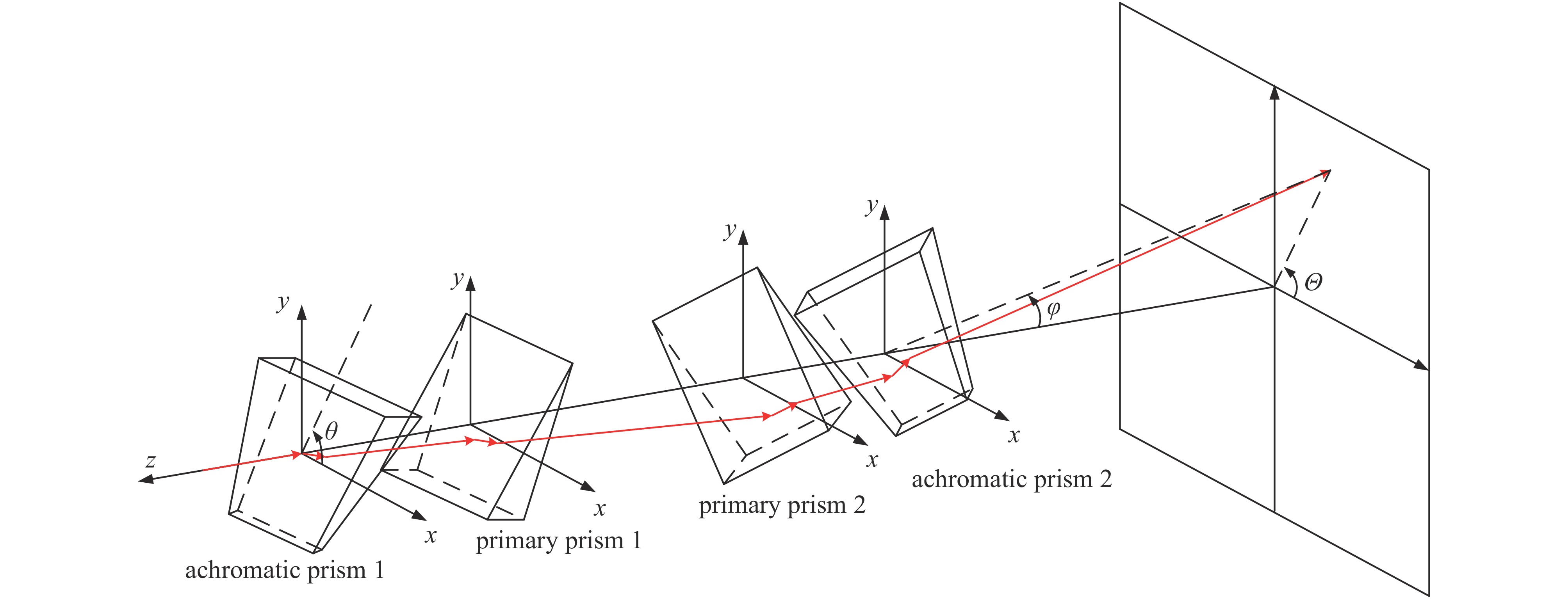
摘要: 为了实现基于双棱镜的光电跟踪平台,需要根据光束指向精确求解两棱镜转角。基于非近轴光线追迹法与二步法,利用神经网络拟合了消色差旋转双棱镜角度差值与偏转角之间的关系,并在求解方位角与消色差旋转双棱镜两组棱镜转角的时候,将其中的非线性关系与线性关系分开,利用神经网络对其中的非线性关系进行了拟合,最终得到了消色差旋转双棱镜转角与出射光束指向的数值关系。实验表明,在仅用3层神经网络共20个神经元的条件下,得到了两棱镜旋转角度反向解算值达到了 0.000 1°量级。Abstract: To achieve an optoelectronic tracking platform based on biprisms, it is necessary to accurately calculate the angle of the Risley prisms based on the beam direction. This article uses non-paraxial ray tracing method and two-step method to fit the relationship between the angle difference and deflection angle of achromatic rotating biprism using the Neural Network. In solving the azimuth angle and the angle of achromatic rotating biprism, we separate the nonlinear relationship from the linear relationship, which is also fitted by using neural network. Finally, the mapping relationship between the angle of achromatic rotating biprism and the direction of the outgoing beam is obtained. The experiment shows that the exact inverse calculation of angle value of 0.000 1° is obtained under the condition of using only three layers of neural network with 20 neurons.
-
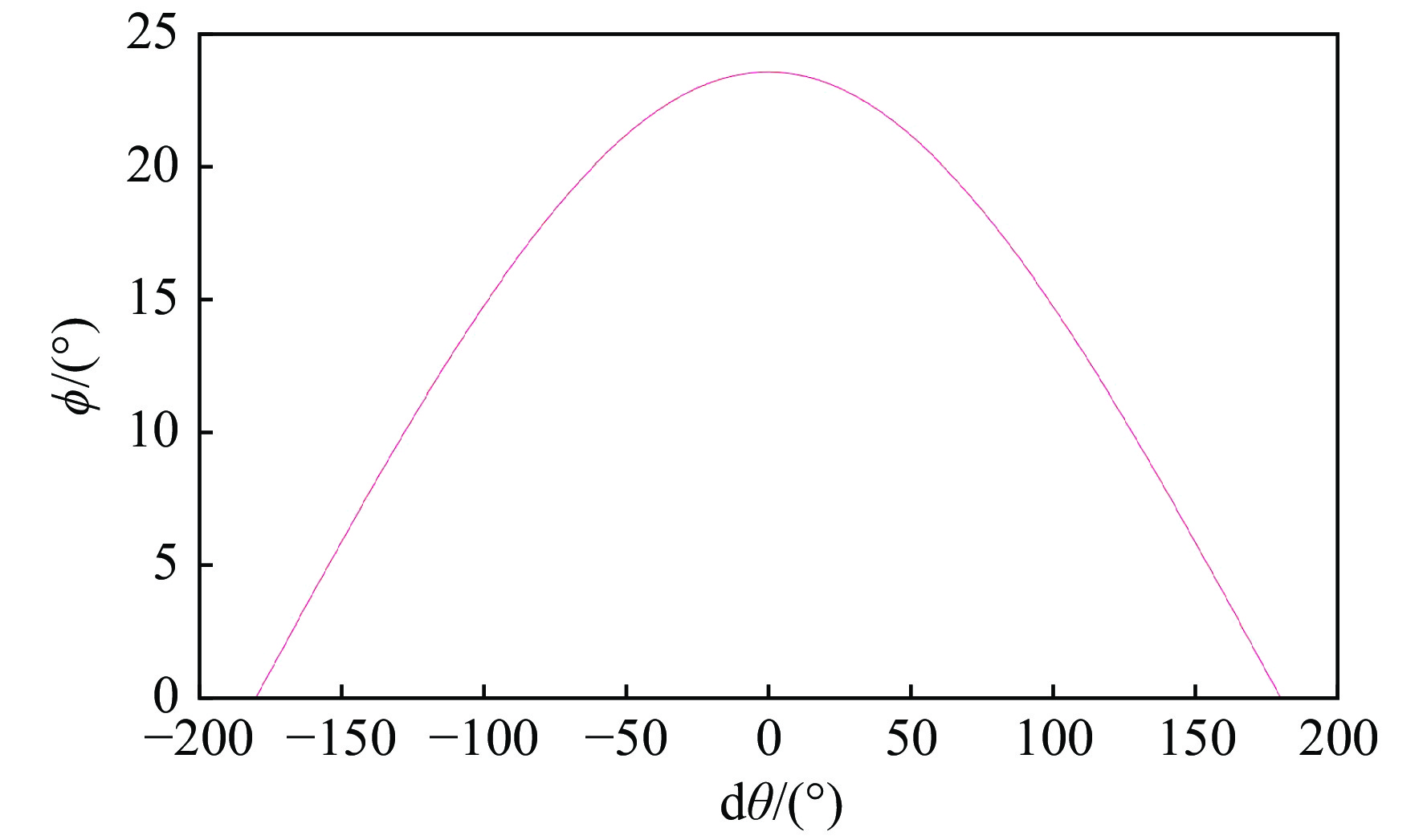
图 4 偏转角与棱镜转角差绝对值的关系
Figure 4. Relationship between deflection angle and absolute value of prism angle difference
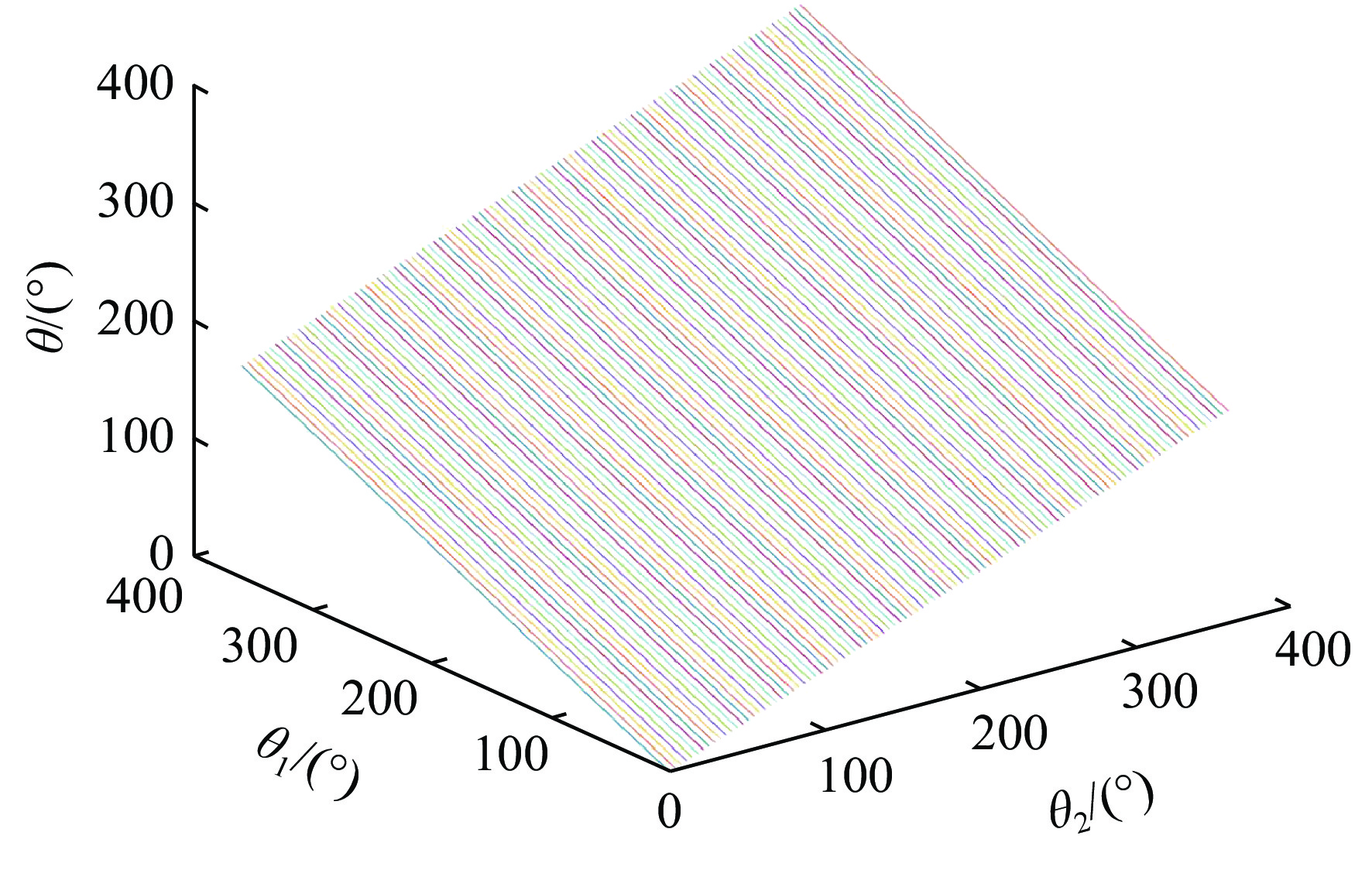
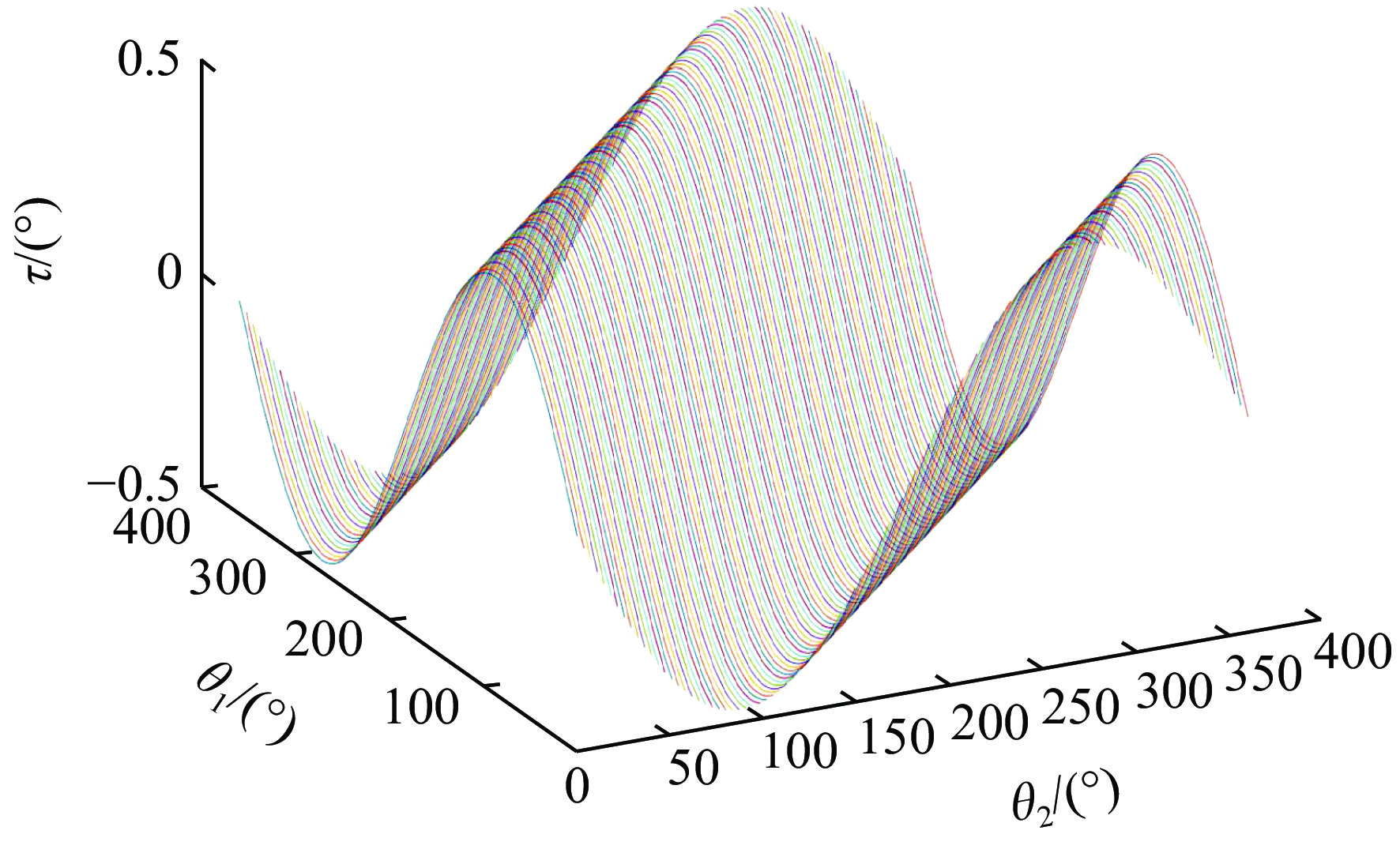
图 6 方位角与两组棱镜转角的关系
Figure 6. Relationship between azimuth angle and two groups of prism angles
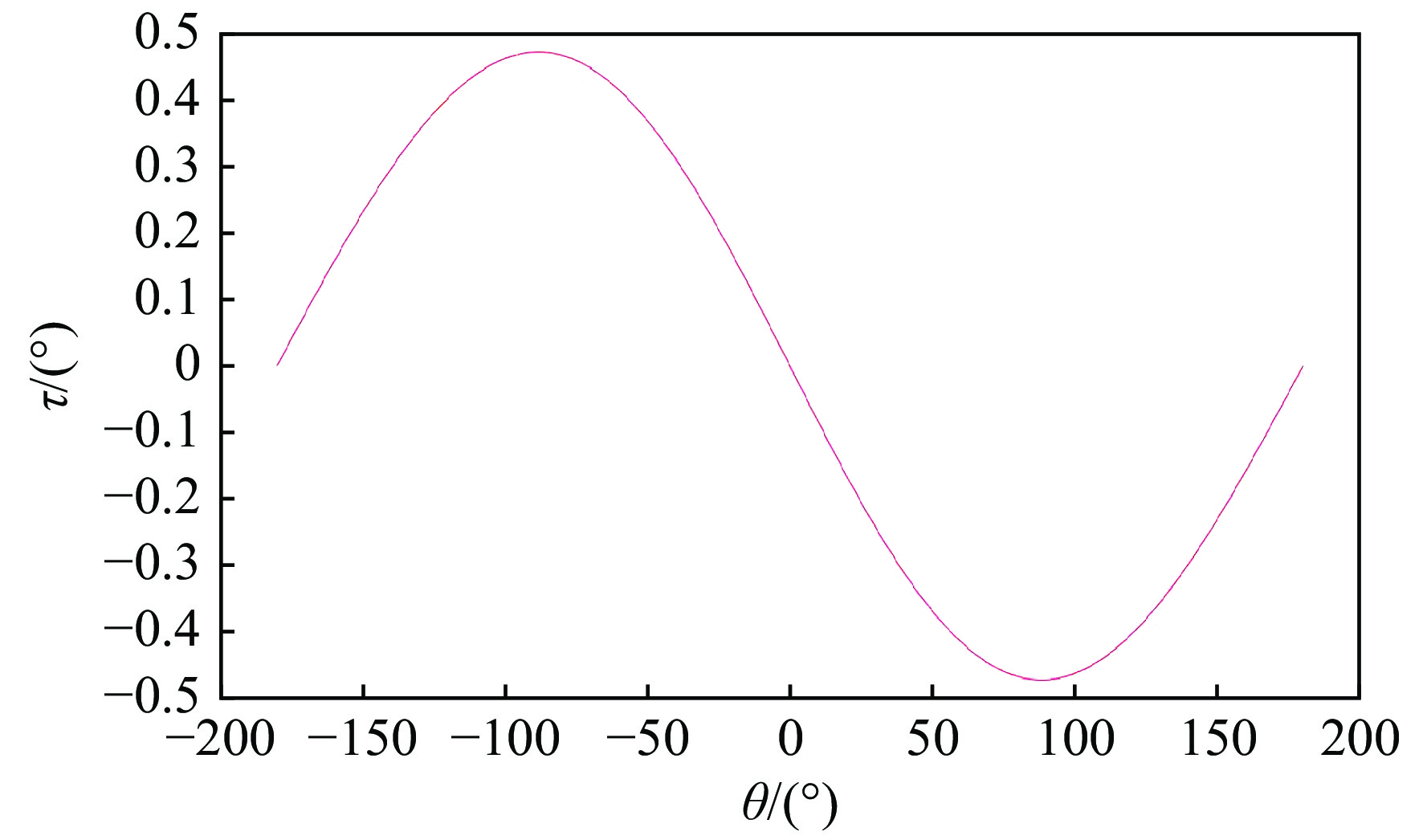
图 8 消色差旋转双棱镜非线性部分与转角差的关系
Figure 8. Relationship between the angle difference and the nonlinear part
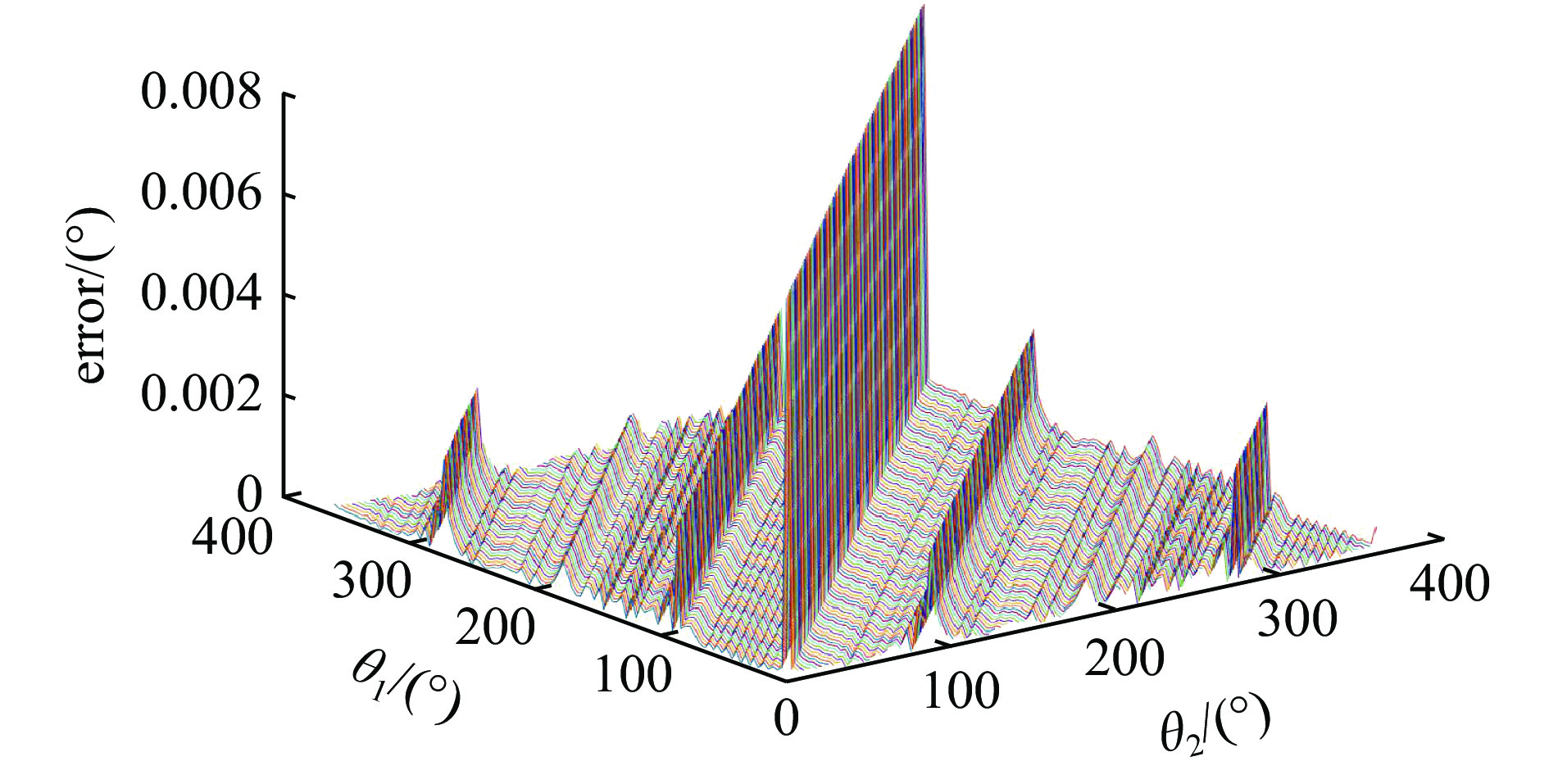
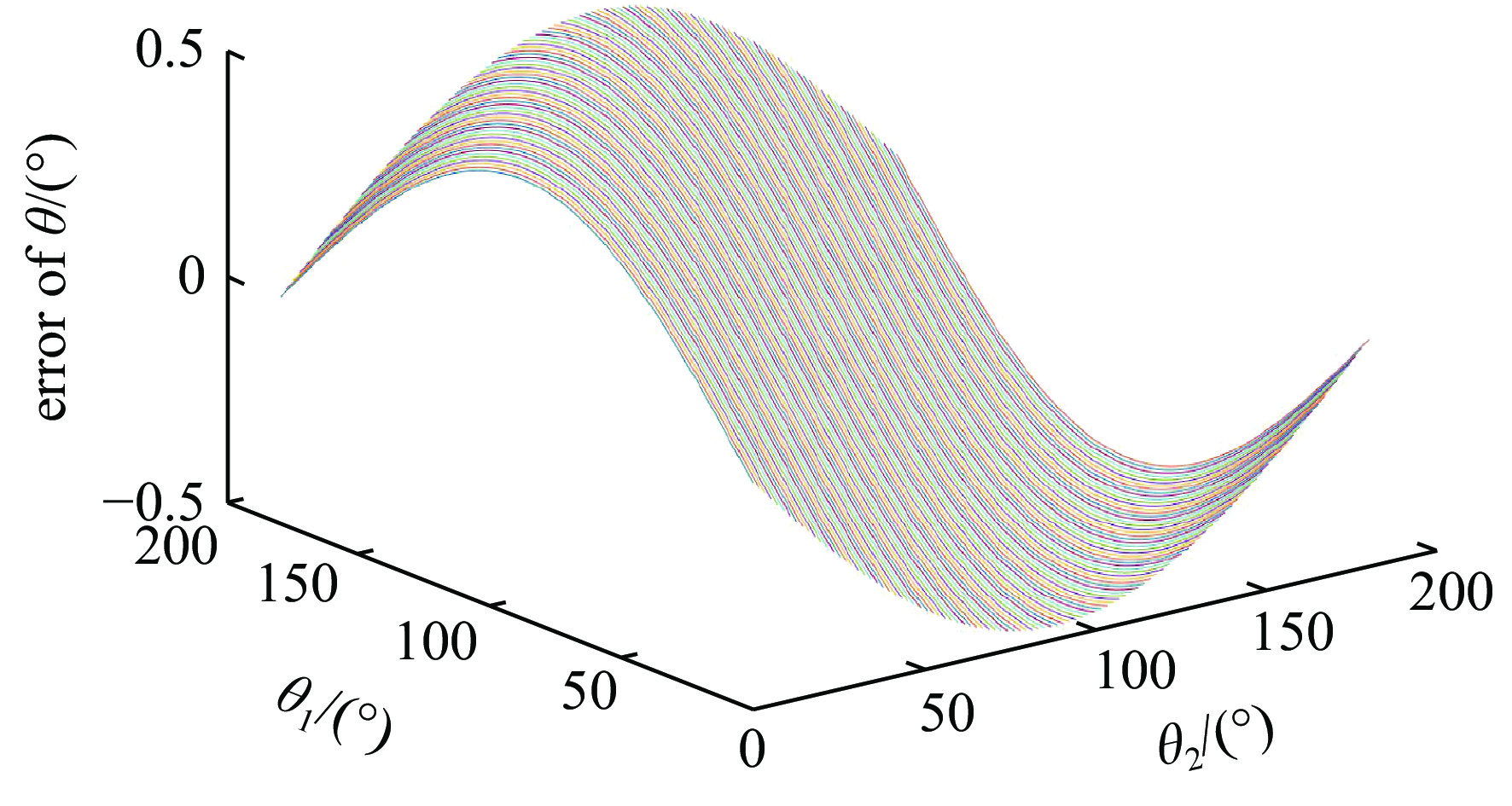
图 12 消色差旋转双棱镜反向解算误差值
Figure 12. Reverse solution error value for achromatic risley prisms
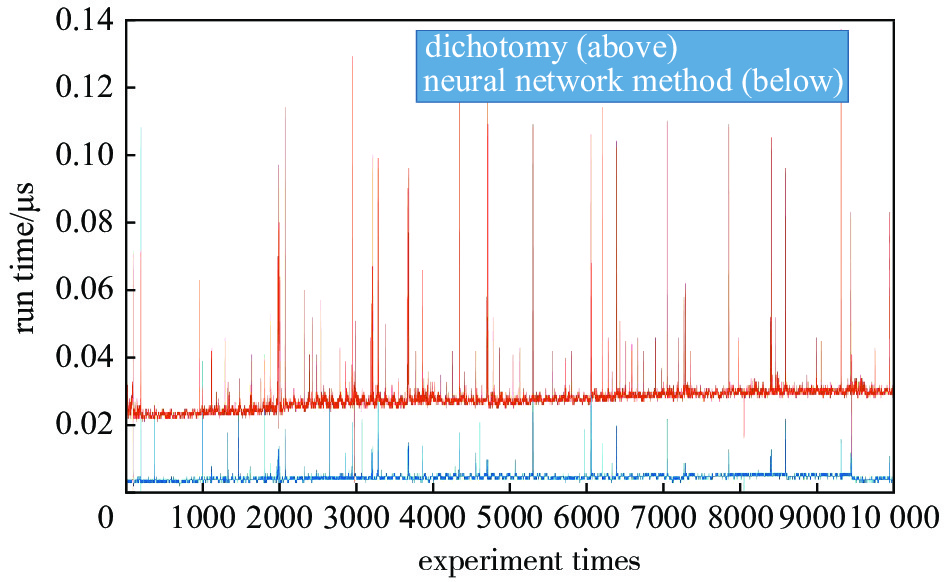
图 13 神经网络算法与二分法运算时间分析
Figure 13. Time analysis of neural network algorithm and dichotomy
表 1 实验结果
Table 1. Results of experiments
unit: (°) ϕ Θ θ1(real) θ2(real) θ1(fitting) θ2(fitting) θ′1(fitting) θ′2(fitting) 0.0186 90.0521 0.1 180 0.0973 180.0023 180.0072 0.1022 0.3724 90.0424 1 179 1.0001 179.0004 179.0845 1.0842 22.0821 4.3389 20 350 348.6781 18.6776 19.9998 350.0002 17.5733 129.2439 90 166 90.0001 166.0000 168.4876 92.4878 22.8874 325.2310 320 330 320.0006 329.9995 330.4613 320.4624  下载: 导出CSV
下载: 导出CSV
-
[1] Wang Zheng, Mastrogiacomo L, Franceschini F, et al. Experimental comparison of dynamic tracking performance of iGPS and laser tracker[J]. The International Journal of Advanced Manufacturing Technology, 2011, 56(1): 205-213. [2] Li Anhu, Jiang Xuchun, Sun Jianfeng, et al. Laser coarse-fine coupling scanning method by steering double prisms[J]. Applied Optics, 2012, 51(3): 356-364. doi: 10.1364/AO.51.000356 [3] Li Anhu, Gao Xinjian, Sun Wansong, et al. Inverse solutions for a Risley prism scanner with iterative refinement by a forward solution[J]. Applied Optics, 2015, 54(33): 9981-9989. doi: 10.1364/AO.54.009981 [4] Tirabassi M, Rothberg S J. Scanning LDV using wedge prisms[J]. Optics and Lasers in Engineering, 2009, 47(3/4): 454-460. [5] Chu C, Tsao T C, Zhou Jingyu, et al. Double Risley prism pairs for optical beam steering and alignment: 20040057656[P]. 2004-03-25. [6] Dillon T E, Schuetz C A, Martin R D, et al. Nonmechanical beam steering using optical phased arrays[C]//Proceedings of SPIE 8184, Unmanned/Unattended Sensors and Sensor Networks VIII. 2011: 81840F. [7] Boisset G C, Robertson B, Hinton H S. Design and construction of an active alignment demonstrator for a free-space optical interconnect[J]. IEEE Photonics Technology Letters, 1995, 7(6): 676-678. doi: 10.1109/68.388762 [8] Degnan J J. Ray matrix approach for the real time control of SLR2000 optical elements[C]//14th International Workshop on Laser Ranging. 2004. [9] 范大鹏, 周远, 鲁亚飞, 等. 旋转双棱镜光束指向控制技术综述[J]. 中国光学, 2013, 6(2):136-150Fan Dapeng, Zhou Yuan, Lu Yafei, et al. Overview of beam steering technology based on rotational double prisms[J]. Chinese Optics, 2013, 6(2): 136-150 [10] Yang Yaguang. Analytic solution of free space optical beam steering using Risley prisms[J]. Journal of Lightwave Technology, 2008, 26(21): 3576-3583. doi: 10.1109/JLT.2008.917323 [11] Li Yajun. Third-order theory of the Risley-prism-based beam steering system[J]. Applied Optics, 2011, 50(5): 679-686. doi: 10.1364/AO.50.000679 [12] Li Yajun. Closed form analytical inverse solutions for Risley-prism-based beam steering systems in different configurations[J]. Applied Optics, 2011, 50(22): 4302-4309. doi: 10.1364/AO.50.004302 [13] Hao Qun, Wang Zihan, Cao Jie, et al. A hybrid bionic image sensor achieving FOV extension and foveated imaging[J]. Sensors, 2018, 18(4): 1042. doi: 10.3390/s18041042 [14] Sasián J M. Aberrations from a prism and a grating[J]. Applied Optics, 2000, 39(1): 34-39. doi: 10.1364/AO.39.000034 [15] Bos P J, Garcia H, Sergan V. Wide-angle achromatic prism beam steering for infrared countermeasures and imaging applications: solving the singularity problem in the two-prism design[J]. Optical Engineering, 2007, 46(11): 113001. doi: 10.1117/1.2802147 [16] 周书芃. 消色差旋转双棱镜光束指向控制技术[D]. 成都: 中国科学院光电技术研究所, 2016Zhou Shupeng. Beam pointing techniques based on achromatic Risley prisms[D]. Chengdu: Institute of Optics and Electronics, Chinese Academy of Sciences, 2016 [17] Yarotsky D. Error bounds for approximations with deep ReLU networks[J]. Neural Networks, 2017, 94: 103-114. doi: 10.1016/j.neunet.2017.07.002 [18] Lacoursiere J, Doucet M, Curatu E O, et al. Large-deviation achromatic Risley prisms pointing systems[C]//Proceedings of SPIE 4773, Optical Scanning. 2002: 123-131. [19] Curatu E O, Chevrette P C, St-Germain D. Rotating-prism scanning system to equip an NFOV camera lens[C]//Proceedings of SPIE 3779, Current Developments in Optical Design and Optical Engineering VIII. 1999: 154-164. [20] 周远, 鲁亚飞, 黑沫, 等. 旋转双棱镜光束指向解析解[J]. 光学 精密工程, 2013, 21(6):1373-1379 doi: 10.3788/OPE.20132106.1373Zhou Yuan, Lu Yafei, Hei Mo, et al. Analytic solution of optical beam steering based on rotational double prisms[J]. Optics and Precision Engineering, 2013, 21(6): 1373-1379 doi: 10.3788/OPE.20132106.1373 -





 点击查看大图
点击查看大图
计量
- 文章访问数: 707
- HTML全文浏览量: 327
- PDF下载量: 81
- 被引次数: 0
