

Design and realization of servo system for phased array antenna of high power microwave
-
摘要: 在某高功率微波系统中,通过控制多路移相器的位置,来达到对微波波束的精确控制。在伺服控制系统的设计中,为了解决强电磁场对伺服系统的干扰与破坏,在设计时从控制系统方案设计、系统组成、移相器单元设计、位置传感器设计、位置环路设计、电路板设计、机箱设计、传输线缆等方面进行严格的针对性设计与处理。设计过程中,对关键器件与部件进行现场试验进行方案验证与选择。最终,在高功率微波系统对目标进行连续辐射的实测中,工作稳定可靠,控制系统对多路移相器的定位精度达到0.1 mm,达到了预期的效果。Abstract: In a high power microwave system, the precise control of the microwave beam is achieved by controlling the position of the multichannel phase shifter. In the design of servo control system, in order to reduce the interference and damage of the strong electromagnetic field to the servo system, the control system conceptual design, phase shifter design, position sensor design, position loop design, circuit board design, chassis design, transmission cable and other aspects are strictly executed and handled. During the design process, field experiments were carried out for the verification and selection of the key components. Consequently, the high-power microwave system is stable and reliable, and the beam control achieves the expected precision (0.1 mm) in a test of continuous radiation on the target.
-
Key words:
- servo control /
- stepping motor /
- position loop /
- control accuracy of beam /
- phase shifter
-
高功率微波在对目标进行破坏的同时,由于微波传导、辐射及耦合等原因[1-5],对自身伺服控制系统中的传感器、执行电机、控制电路、通讯链路等有强烈的干扰,严重时导致伺服系统不能正常工作甚至彻底被破坏。因此高功率微波系统的伺服控制系统在工程设计时,重点放在解决强电磁场对系统的干扰方面,使伺服系统能够在强电磁场环境中正常工作,保证伺服系统控制精度。本文在高功率微波系统伺服控制系统的设计中,从伺服系统方案设计、系统组成、移相器单元设计、位置传感器设计、位置环路设计、电路板设计、机箱设计、传输线缆等方面进行严格的针对性设计与处理,并在设计过程中对关键器件与部件进行了现场试验进行方案验证与选择。最终,设计的伺服控制系统在强电磁场环境中工作稳定可靠,满足了系统精度指标,达到了预期的效果。该伺服系统的研制成功对后续高功率微波系统的试验和测试具有重要的作用。
1. 伺服控制系统总体方案
1.1 系统组成
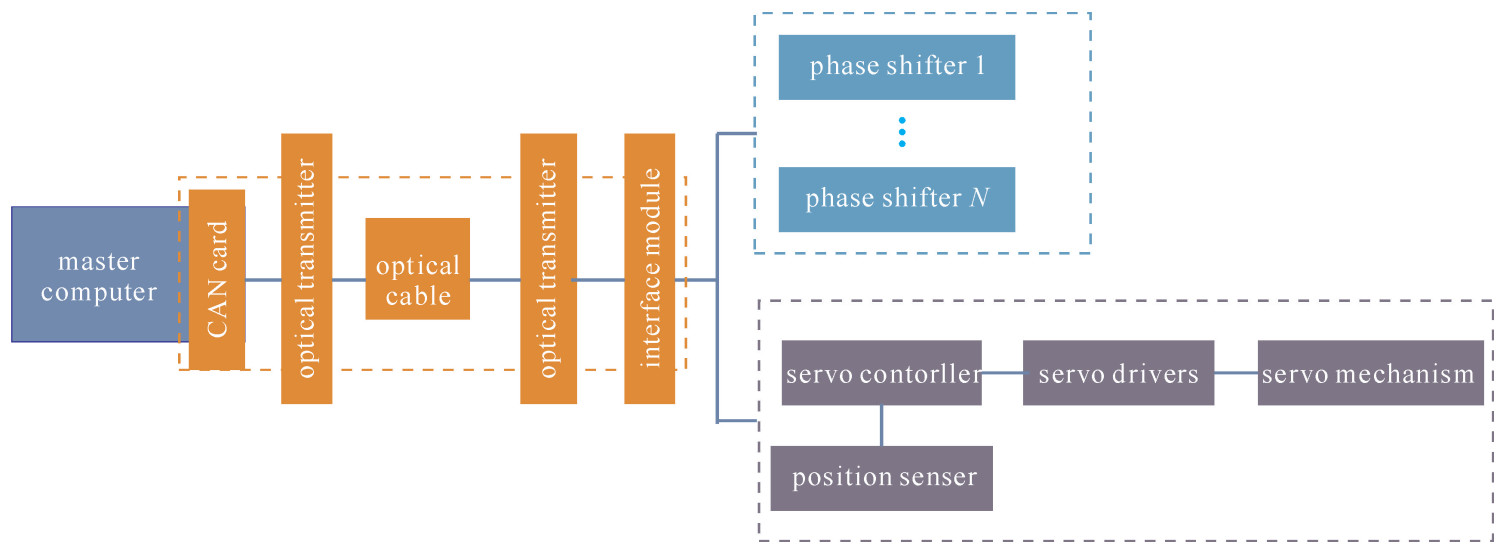
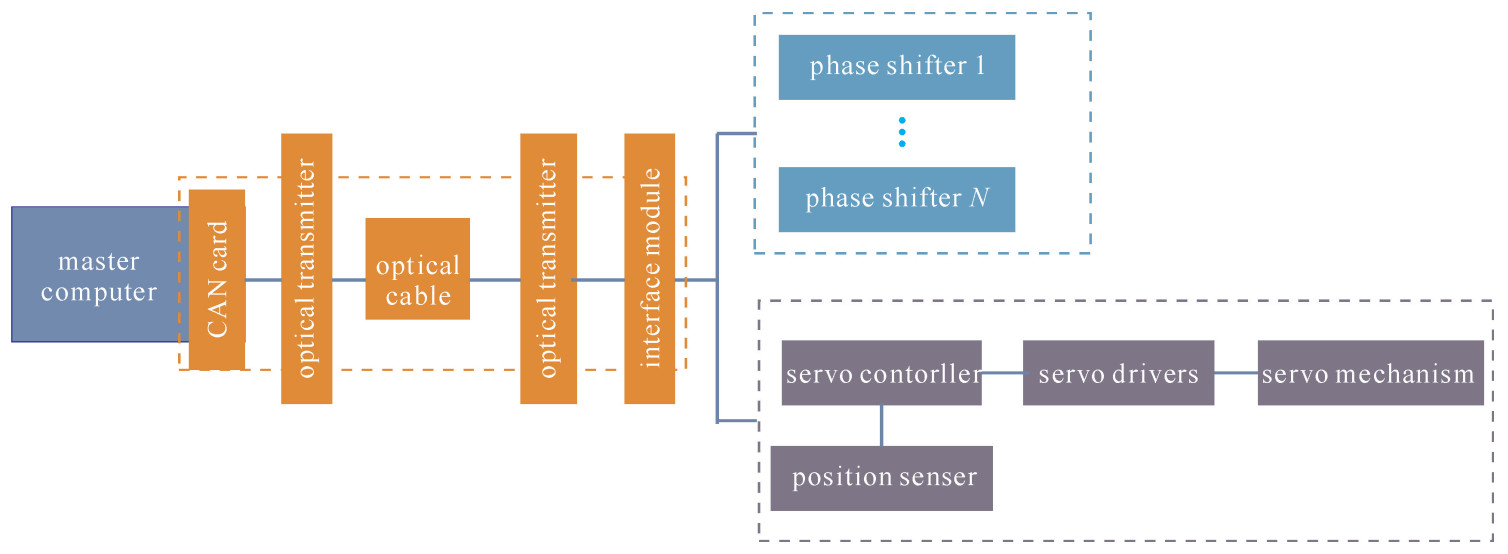
系统由中心控制计算机、通讯链路、方位波束控制及俯仰机构控制单元、伺服执行机构及多路移相器单元组成, 系统组成原理如图 1所示。
1.2 系统工作流程
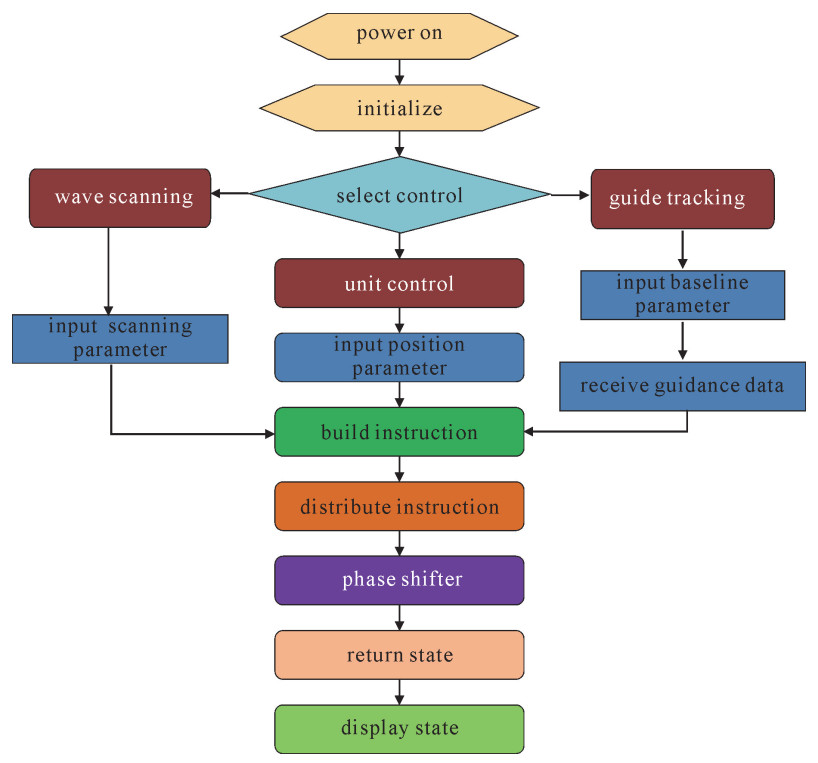
通过中心控制计算机控制多路移相器作直线往返与定点动作,同时控制平板天线作俯仰运动。通过控制多路移相器运动,可实现天线波束在方位上有规律地电扫,或者由控制计算机将引导角度进行解算后使天线波束按照解算后的角度进行定点或者进行跟踪动作, 系统工作流程如图 2所示。
2. 关键技术设计
由于微波传导、辐射等原因,电磁波对伺服控制系统中的传感器、执行电机、控制电路、通讯链路等有强烈的干扰作用。电机与位置传感器及移相器安装真空腔内,由于移相器与腔体之间存在间隙,微波辐射强度非常大。伺服控制机箱与电缆也处在强电磁场的环境中,区域内的电磁环境十分复杂。
因此,在设计时除了要考虑常规伺服系统的功能指标外,更为重要的是要从伺服系统方案设计、移相器单元设计、位置传感器设计、位置环路设计、接口电路设计、电路板设计、机箱防护设计、通讯链路等方面进行严格的强电磁场的屏蔽防护与处理[6-7]。
2.1 通讯链路设计
对外接口信号的通讯链路采用光纤传输,将Can通讯接口通过光端机转换为光信号进行传输,光纤传输是一种应对外部电磁干扰效果极佳且彻底的防护手段。由于光导纤维仅对光信号进行传导,而且不会与电磁脉冲产生耦合作用,具有电磁绝缘性能好、衰减较小等优点,因此采用光导纤维完成各种电子设备之间的信号传输,能够有效防止电磁脉冲对通讯链路的干扰[8-9]。
光缆采用7芯单模光纤通信光缆,每芯光缆两端分别连接一对光端机,从而实现电-光-电信号的转换。采用光缆通信可以延长通信距离,并具有抗强电磁干扰的能力。
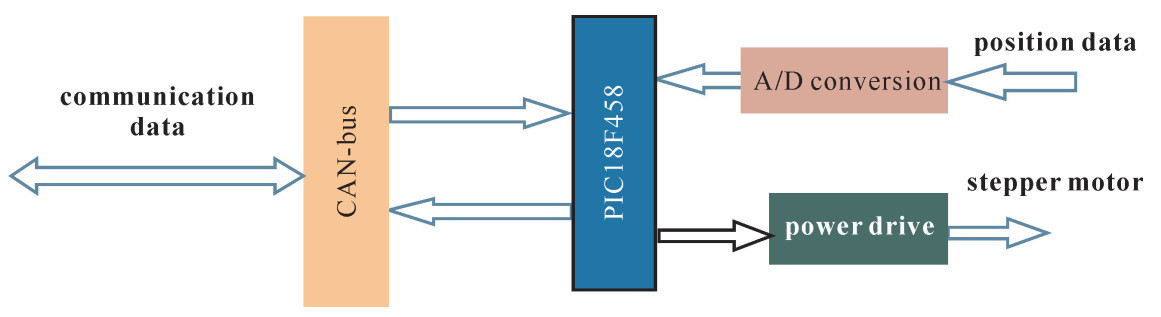
2.2 单路移相器控制单元设计方案
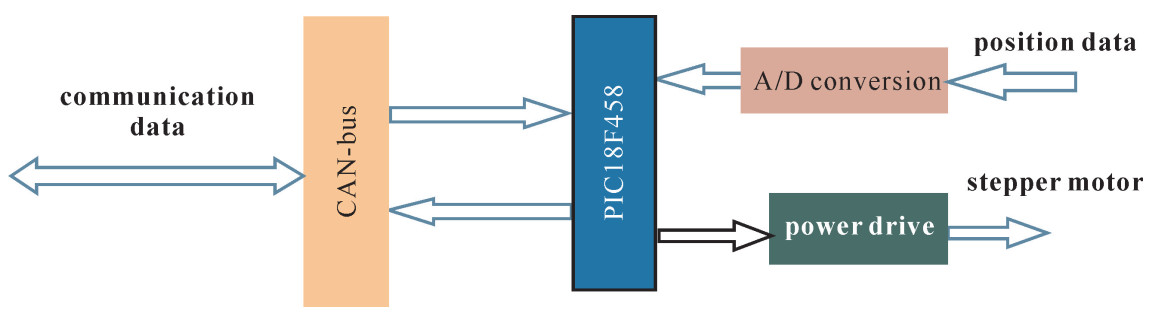
控制器通过CAN总线接收上位机指令通过功率驱动单元驱动直线电机独立控制每一路移相器运动,实时接收位移传感器位置数据进行位置闭环控制。单路移相器控制单元设计方案如图 3所示。
在处理芯片与位置传感器的选择时,通过现场实际测试比较,最终选择PIC18F458作为主处理芯片,精密位置传感器作为位置采样器件。PIC18F458处理器采用哈佛总线结构,具有PWM输出模块及8路16位A/D转换模块,功能较强,内核电压为5 V,抗干扰能力强大。在实际测试中,PIC18F458+精密位置传感器的方案相比较DSP+光电增量编码器的方案有更强的抗干扰能力。
执行电机选用精密直线步进电机,行程50 mm, 推力可达10 N,导程2.56 mm, 通过细分控制,可取得极高的定位精度。
2.3 移相器单元设计
2.3.1 移相器结构设计
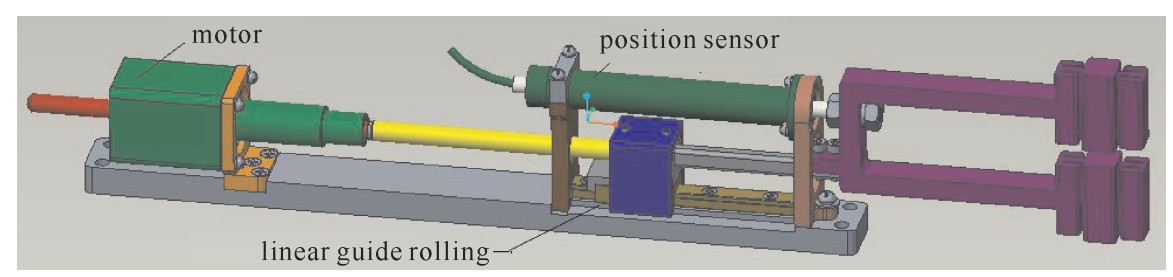
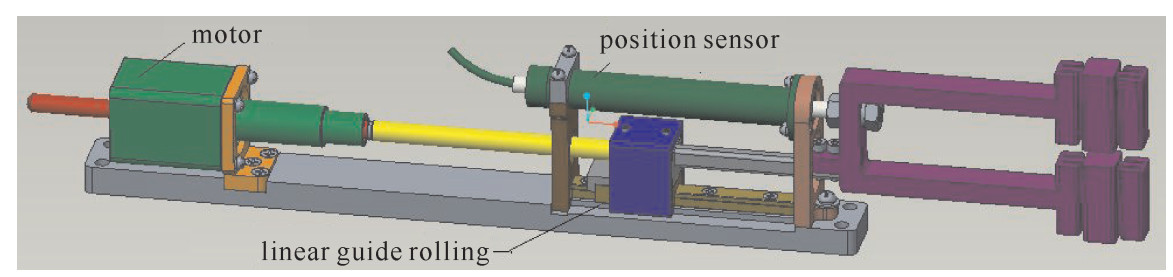
相控阵天线波束控制由多路移相器单元组成,按照指标要求定制了结构尺寸合适的精密直线电机及精密位置传感器,其单路结构示意图如图 4所示。
每一路移相器都由精密丝杠电机、高精度直线导轨、位置传感器、移相器模块组成,在直线导轨上方平行安装位置传感器,步进电机间接驱动移相器模块进行直线往返运动,同时带动位置传感器进行移相器位置测量与控制。
2.3.2 位置传感器设计
系统移相器位置测量精度要求较高,测量传感器采用定制的精密位移传感器,它的线性行程较长,精度达0.05%,在使用中,对传感器输出端用导电布进行了屏蔽,通过测试,相比较光电编码器及其他传感器,它的抗干扰能力更强,几乎不受微波辐射的影响,安装简单,体积小,精度高,达到了系统的设计要求。
2.3.3 接口电路设计
2.3.3.1 位置采样电路接口设计
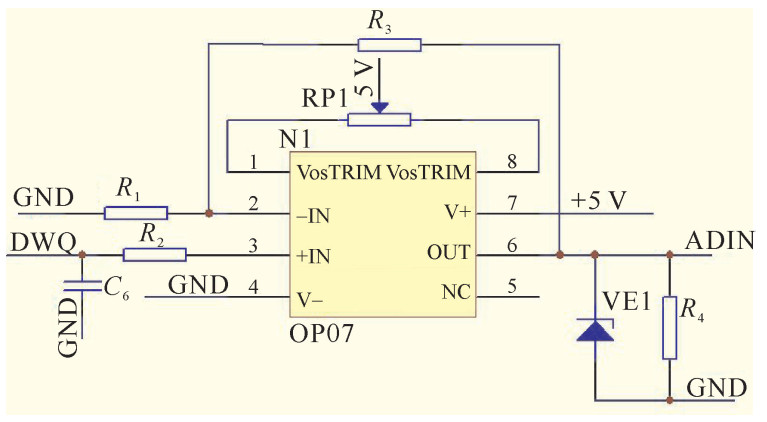
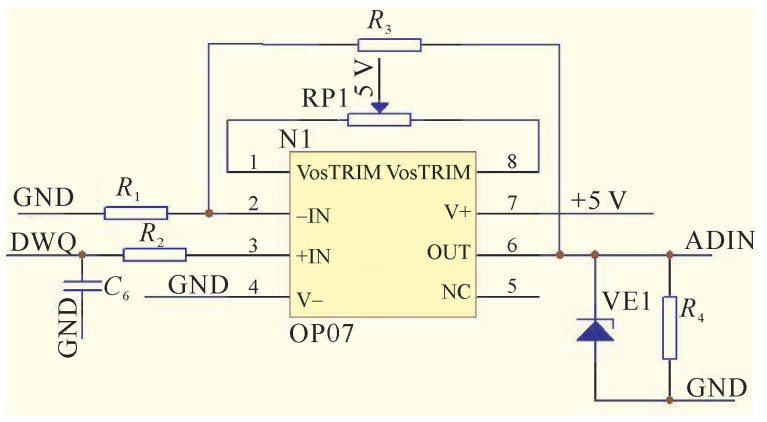
精密位置传感器的最大阻抗为2 kΩ,为了提高输入信号的输入阻抗,减小干扰对采样位置电压的影响,采样接口电路设计了电压跟随器,采样值通过电压跟随器后进入A/D转换接口进行A/D转换,电压跟随器电路如图 5所示。
电路中,输出电压Vo(ADIN管脚)与输入电压Vi(DWQ管脚)的关系为
(1) 通过电压跟随器,大大提高了信号输入阻抗,减小了干扰成分对采样信号的影响,提高了采样电压的精度,满足了系统的精度要求。
2.3.3.2 通讯接口电路设计
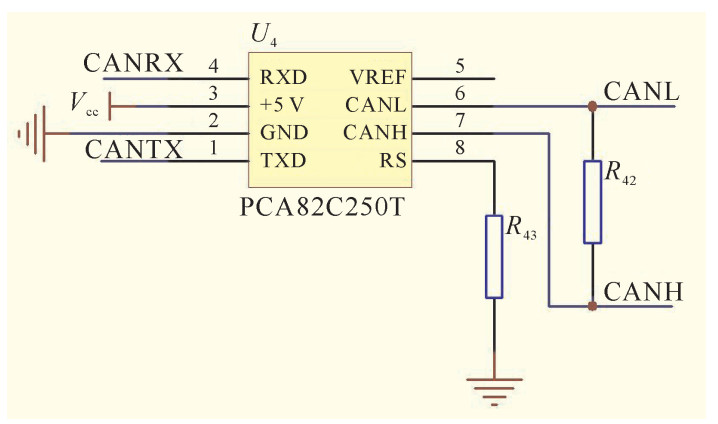
与上位机的通讯采用CAN总线结构,CAN总线集成了CAN协议的物理层与数据链路层的功能,与其他通讯总线相比,有突出的可靠性、抗干扰能力和实时性。接口模块由PCA82C250总线收发芯片及外围电路组成,负责将移相控制器或俯仰控制器送出的收发数据转换为标准CAN电平信号,与光端机CAN接口进行连接。
CAN总线接口电路如图 6所示。
2.3.3.3 电源接口电路设计
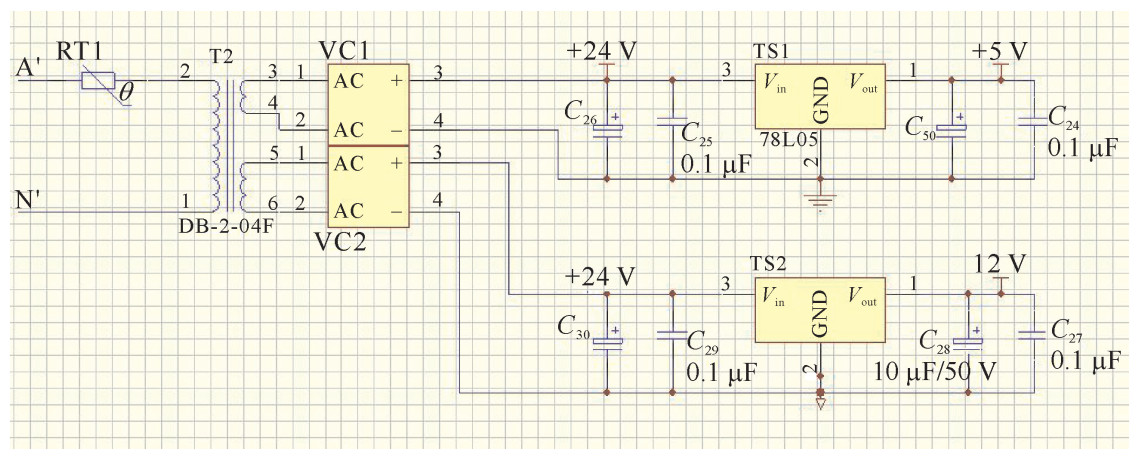
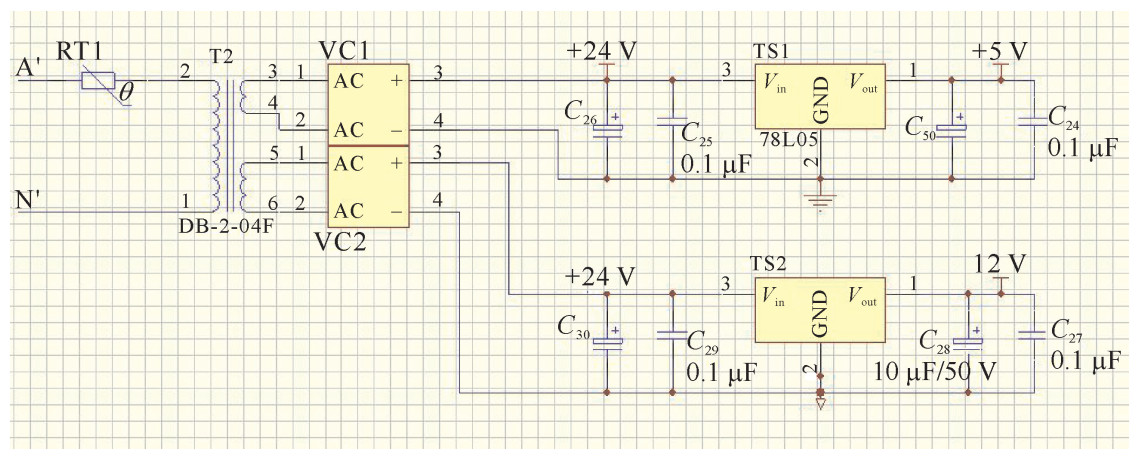
伺服系统采用市电或油机供电,交流220 V,伺服控制需要直流24 V,12 V,5 V稳压电源,电源的转换采用变压器进行转换,变压器转换电路如图 7所示。
通过变压器隔离,使供电一次侧与二次侧的电器完全绝缘,使该回路隔离,利用变压器铁芯高频损耗大的特点,抑制高频杂波传入控制回路,提高了伺服控制系统抗干扰能力。
2.3.4 采样数据软件滤波
系统A/D转换的周期为50 μs, 伺服系统的执行周期为4 ms, 为了减小采样干扰对电压的影响,对采样值进行了软件滤波,首先对随机的突变采样值进行了滤除,对符合要求的值每20个数据进行求均值处理,把平均值作为移相器的对应位置进行位置闭环处理,滤波程序如下:
char filter()
{
int sum=0;
for(count=0;count < 20;count++)
{
sum+=get_ad();
delay();
}
return(char)(sum/20);
}
2.3.5 位置环的控制
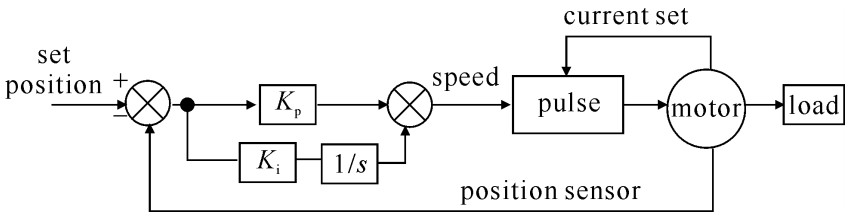
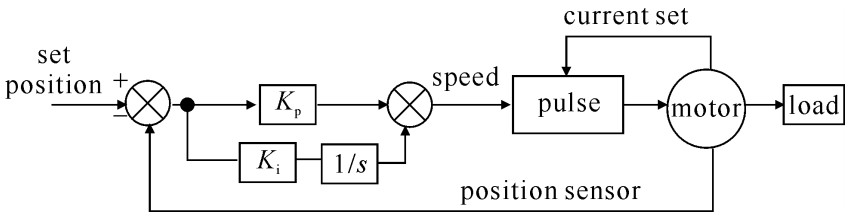
移相器的最大响应速度要求较快,位置定点闭环精度要求较高,因此为了提高伺服系统快速响应及减小静态误差,提高位置控制精度,本系统在位置环的控制中采用比例积分控制,控制框图如图 8所示。
其PI控制器输出PWM频率的系数
(2) 式中:Kp为比例增益,Ki为积分增益;e(t)为位置误差;U(t)为处理器输出PWM频率的系数。
实测中,通过采样数据判断移相器相对目标的不同位置,根据移相器相对目标的不同位置分段调整比例增益Kp和积分增益Ki的值,改变输出PWM的频率,提高移相器在不同位置的响应特性,并消除静差,提高了位置环的定位精度。
2.3.6 控制电路板电磁兼容性设计
在伺服控制电路板设计时主要通过以下手段提高电路板的电磁兼容特性:(1)电路板布局时,对地层进行合理分配,避免层与层之间的干扰;(2)电路板布线时,对高频器件走线加入屏蔽层处理,抑制共模信号干扰;(3)部分接口信号采用光耦隔离,避免电磁干扰经导线进行耦合;(4)放置元器件时,避免将辐射较强的元器件与易受干扰的元器件相邻放置。
2.4 控制机箱与电缆的防护设计
本系统中,高功率微波能量主要通过后门耦合,即能量通过机壳的缝隙或者小孔和电缆辐射到系统中,对集成电路和敏感器件进行干扰破坏[10], 因此, 阻止高能微波信号进入腔体就要从小孔和缝隙入手进行处理。
2.4.1 机箱屏蔽处理
控制机箱采用金属机箱,采取如下措施进行防护: (1) 设计时使机箱盖板与机箱结合紧密, 减小缝隙; (2) 增加缝隙的深度, 以便减小耦合;(3) 接缝处用导电橡胶衬垫及屏蔽布网等微波吸收材料填充缝隙;(4) 机箱接插件等孔洞用金属屏蔽网对孔洞进行屏蔽,在接插件与机箱结合处安装导电橡胶垫进行屏蔽。
2.4.2 电源线和信号线的屏蔽处理
屏蔽采取以下措施:(1)电源线和信号线采用带屏蔽层的电缆,电源线和信号线分开走线;(2)电缆线的屏蔽层与机箱的外壳相接,通过机箱上的接地柱和大地相接。
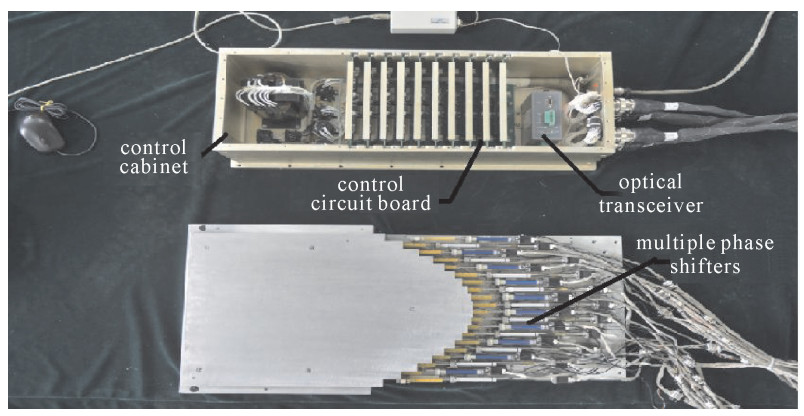
2.5 伺服控制机箱与移相器单元整体布局及防护处理
控制机箱内有变压器、光端机、控制电路板及电缆等,在布局时将电路板与光端机相邻放置,将变压器单独隔离放置,变压器初级电源线用屏蔽材料进行处理,在机箱内单独走线,避免对其他线路进行干扰。各移相器单元布局时使信号线与电源线单独进行屏蔽处理,避免线缆相互交叉,减小相互间的干扰。伺服控制机箱与移相器单元整体布局装置图如图 9所示。
 图 9 伺服控制机箱与移相器单元整体布局装置图Figure 9. Overall layout o the control cabinet and phase shifter unit
图 9 伺服控制机箱与移相器单元整体布局装置图Figure 9. Overall layout o the control cabinet and phase shifter unit3. 试验结果
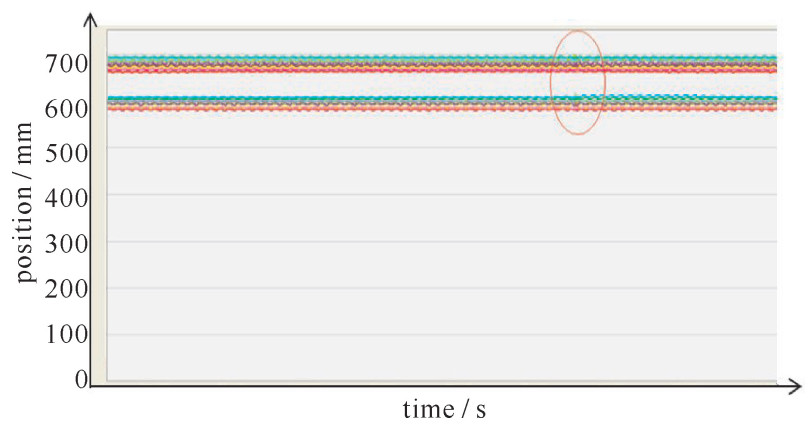
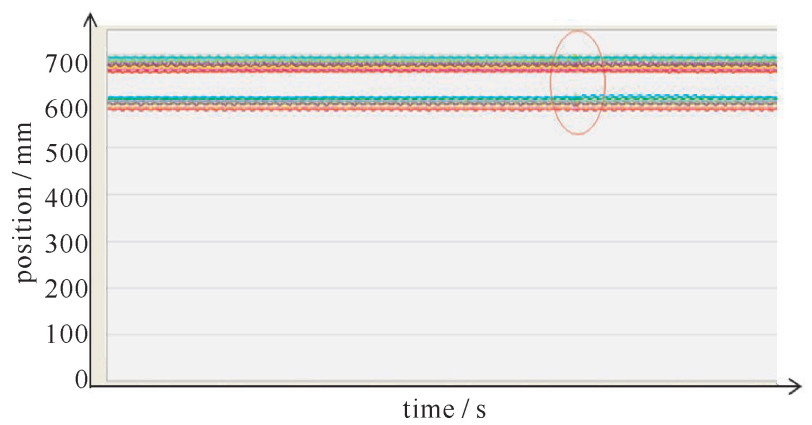
通过对以上关键单元有针对性的伺服控制设计与电磁屏蔽设计,在伺服控制系统装车完毕后,在外场针对目标进行了打击试验,高功率微波针对目标进行了以固定频率连续激发20个脉冲的试验,伺服控制系统运行正常,其中20路移相器位置定位精度的数据如图 10所示。
图 10中纵坐标为位置采样数据,横坐标为时间,彩色线为20路移相器的位置曲线,高功率微波在以固定频率连续激发20个脉冲时,20路移相器的位置精度几乎不受影响,脉冲过后恢复到定点位置,没有累积误差,定位精度为0.1 mm,满足系统指标要求。
高功率微波系统在试验现场对目标进行辐射试验时,目标被成功破坏,进一步验证了伺服系统对高功率微波波束控制的准确性。
4. 结论
本文研究了伺服系统对高功率微波相控阵天线多路移相器进行精密定位的方案和实现途径,重点对伺服系统在强电磁场干扰环境中的干扰途径进行了分析并进行了针对性设计。最终设计的伺服控制系统对多路移相器的控制精度达到0.1 mm,在强电磁场环境中工作稳定可靠,满足系统精度指标,达到了预期的效果。该伺服系统的研制成功对后续高功率微波系统的试验和进一步探索具有重要的作用。
-

图 9 伺服控制机箱与移相器单元整体布局装置图
Figure 9. Overall layout o the control cabinet and phase shifter unit
-
[1] 王邦继, 刘庆想, 张政权, 等. 机械相控阵列天线的电机控制系统设计[J]. 强激光与粒子束, 2012, 23(11): 3123-3126. http://www.hplpb.com.cn/article/id/5511Wang Bangji, Liu Qingxiang, Zhang Zhengquan, et al. Design of motor control system for mechanical phased array antenna. High Power Laser and Particle Beams, 2012, 23(11): 3123-3126 http://www.hplpb.com.cn/article/id/5511 [2] 周磊, 刘庆想, 李相强, 等. 用于阵列天线连续跟踪的步进电机控制器IP核设计[J]. 强激光与粒子束, 2011, 23(11): 3099-3102. http://www.hplpb.com.cn/article/id/5501Zhou Lei, Liu Qingxiang, Li Xiangqiang, et al. Design of stepping motor control IP core for array antenna successive scanning. High Power Laser and Particle Beams, 2011, 23(11): 3099-3102 http://www.hplpb.com.cn/article/id/5501 [3] 周一飞, 刘庆想, 李相强, 等. 螺旋天线步进电机控制系统仿真及运行曲线优化[J]. 强激光与粒子束, 2014, 26: 063020. doi: 10.11884/HPLPB201426.063020Zhou Yifei, Liu Qingxiang, Li Xiangqiang, et al. Simulation of helical antenna stepper motor control system and optimization of running curve. High Power Laser and Particle Beams, 2014, 26: 063020 doi: 10.11884/HPLPB201426.063020 [4] 王邦继, 刘庆想, 周磊, 等. FPGA在多轴步进电机控制器中的应用[J]. 电机与控制学报, 2012, 16(3): 78-82. https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201203014.htmWang Bangji, Liu Qing-xiang, Zhou Lei, et al. FPGA-based multiple-axis stepper motor controller. Electric Machines and Control, 2012, 16(3): 78-82 https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201203014.htm [5] 程树康, 刘宝廷, 宋立伟, 等. 步进电动机及其驱动控制系统[M]. 哈尔滨: 哈尔滨工业大学出版社, 2007: 1-2.Chen Shukang, Liu Bao-ting, Song Liwei, et al. Stepper and its drive and control system. Harbin: Harbin Institute of Technology Press, 2007: 1-2 [6] 李志强, 王旭光. 基于TMS320LF2407DSP的直线步进电机速度控制的研究[J]. 伺服控制, 2011, 8(3): 34-37. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKF201002010.htmLi Zhiqiang, Wang Xuguang. Research on speed control of line step motor based on TMS320LF2407DSP. Servo Control, 2011, 8(3): 34-37 https://www.cnki.com.cn/Article/CJFDTOTAL-JXKF201002010.htm [7] 黄楚芳, 陈鸿. 步进电机加减速控制器的设计[J]. 山西电子技术, 2009, 37(1): 30-31. https://www.cnki.com.cn/Article/CJFDTOTAL-SXDS200901014.htmHuang Chufang, Chen Hong. The design and implementation of acceleration/deceleration controller of stepper motor. Shanxi Electronic Technology, 2009, 37(1): 30-31 https://www.cnki.com.cn/Article/CJFDTOTAL-SXDS200901014.htm [8] Boudjit K. Real-time digital control using DSP of a multiple motors system[J]. Journal of Electrical Systems, 2009, 10(1): 30-35. [9] Allegro Microsystems Inc. A3953: Full-bridge PWM motor driver[EB/OL]. Allegro Microsystems Inc, 2000. http://www.allegromicro.com/en/Products/Part_Numbers/3953/3953.pdf. [10] 周传明, 刘国治, 刘永贵, 等. 高功率微波源[M]. 北京: 原子能出版社, 2007.Zhou Chuanming, Liu Guozhi, Liu Yonggui, et al. High-power microwave sources. Beijing: Atomic Energy Press, 2007 期刊类型引用(2)
1. 许睿,王邦继,刘庆想,王东,翁红. 微型无刷直流电机位置系统的过程控制. 强激光与粒子束. 2022(04): 47-53 .  本站查看
本站查看2. 袁敏,曹妍,王媛媛. 光场非等距双向传播的实时信号处理系统. 激光杂志. 2021(04): 192-196 . 百度学术其他类型引用(1)
-

 下载:
下载:
 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1196
- HTML全文浏览量: 240
- PDF下载量: 209
- 被引次数: 3
