

Upgrade of low level RF system based on Micro Telecom Computing Architecture (MTCA) for HLS-II LINAC
-
摘要: 合肥光源(HLS-II)在重大维修改造之后,其光源性能有了很大的提升。为了进一步实现连续、平稳地供光,需要对其进行恒流改造。恒流运行要求直线加速器的微波功率源有长期的稳定性与可靠性,旧的模拟低电平控制系统满足不了要求。本文基于微型电信计算平台(MTCA)设计实现了数字低电平控制系统,控制微波功率源的幅度和相位,它由以FPGA为核心的数字板卡、射频板卡、MTCA机箱以及频率合成系统组成。该数字低电平系统工作在2856 MHz的S波段,在线运行幅度稳定度达到0.04%,相位稳定度达到0.2°,满足恒流改造对直线加速器数字低电平系统0.25°相位抖动RMS值的相位精度要求。Abstract: The performance of Hefei Light Source II (HLS-II) has improved a lot after major maintenance and reconstruction. To further provide continuous and stable light, the RF system of the HLS-II LINAC needs to be upgraded for top-off mode. It is required that the RF power source have long-time stability and reliability, but the old analog low level RF system(LLRF) can’t meet the requirement. Hence a digital low level RF control system based on Micro Telecom Computing Architecture(MTCA) is designed and implemented to control the amplitude and phase of the RF power source. This system is composed of digital board cards based on FPGA, RF board cards, MTCA chassis and a frequency synthesis system. It works at 2856 MHz of S band, with phase and amplitude stability up to 0.2° and 0.04% respectively, which meets the top-off mode requirement of 0.25° RMS phase jitter of the digital low-level RF system in the HLS-II LINAC.
-
Key words:
- HLS-II /
- LINAC /
- low level RF system /
- FPGA /
- MTCA
-
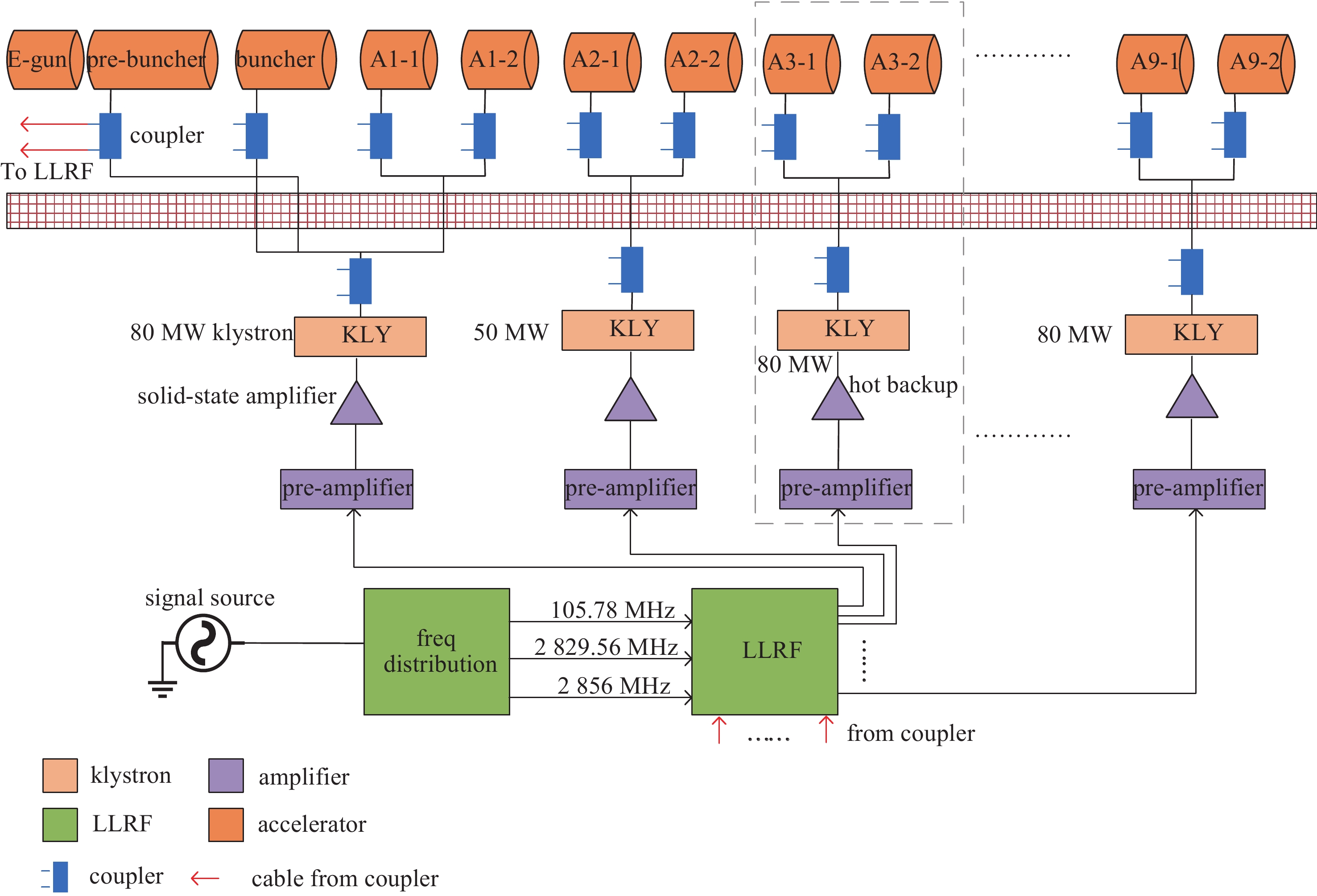
图 1 合肥光源直线加速器布局图
Figure 1. Layout of the linear accelerator of Hefei Light Source Ⅱ (HLS-Ⅱ)
-
[1] Bai Zhenghe, Wang Lin, Jia Qika, et al. Lattice optimization for the HLS-Ⅱ storage ring[J]. Chinese Physics C, 2013, 37: 017001. doi: 10.1088/1674-1137/37/1/017001 [2] Bai Zhenghe, Wang Lin, Jia Qika, et al. Lattice study for the HLS-Ⅱ storage ring[J]. Chinese Physics C, 2013, 37: 047004. doi: 10.1088/1674-1137/37/4/047004 [3] Zhang Hao, Li Weimin, Feng Guangyao, et al. The magnet design for the HLS storage ring upgrade project[J]. Chinese Physics C, 2012, 36: 91-95. doi: 10.1088/1674-1137/36/1/016 [4] Wang Lin, Li Weimin, Feng Guangyao, et al. The upgrade project of Hefei light source (HLS)[C]//Proceedings of the IPAC. 2010: 2588-2590. [5] PICMG. MicroTCA overview[EB/OL]. https://www.picmg.org/openstandards/microtca/. [6] Wibowo S B, Matsumoto T, Michizono S, et al. Digital low level RF control system for the International Linear Collider[J]. Physical Review Accelerators and Beams, 2018, 21: 082004. doi: 10.1103/PhysRevAccelBeams.21.082004 [7] Pfeiffer S. LLRF controls and feedback: free-electron lasers and energy recovery linacs[C]//Proceedings of the CAS-CERN Accelerator School: Free Electron Lasers and Energy Recovery Linacs.2018. [8] DWC8VM1. MTCA.4 Downconverter[EB/OL]. https://www.struck.de/dwc8vm1.html. [9] SIS8300-L. MTCA.4 Digitizer[EB/OL]. https://www.struck.de/sis8300-l2.html. [10] Song Yifan, Li chuan, Xuan Ke, et al. Automatic data archiving and visualization at HLS-Ⅱ[J]. Nuclear Science and Techniques, 2018, 29: 129. doi: 10.1007/s41365-018-0461-6 -

 下载:
下载:


 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 1840
- HTML全文浏览量: 468
- PDF下载量: 84
- 被引次数: 0
