

Coordinate unification between treatment room and the robot system of Heavy Ion Medical Machine
-
摘要: 治疗室与其机器人是重离子治疗装置(HIMM)精准治疗系统的重要组成部分,为了提升重离子放疗过程中患者摆位的精度和效率,研究一种使用激光跟踪仪和其配套软件SA将运载治疗床的机器人基座坐标系与治疗室坐标系统一的方法,通过图形拟合的方法确定了标定点在法兰盘坐标系中的坐标;通过数学模型的搭建完成了机器人法兰盘坐标系和基座标系之间的坐标变换;利用SA软件中最佳拟合算法求出了治疗室坐标系与机器人坐标系之间的变换矩阵,完成了坐标系的统一。在HIMM中的实际应用表明,坐标系的统一方法的使用不但简化了标定点在法兰盘中心坐标系中坐标的标定,简化了法兰盘中心坐标系和基座标系转换的计算过程,而且标定精度良好、效率更高,更加符合重离子精准治疗系统及其他工业应用。Abstract: To accurately locate patients in the process of heavy ion therapy for cancer, a method of coordinate unification between treatment room and the robot system of heavy ion therapy system based on the laser tracker and its supporting software Spatial Analyzer is proposed. First, we determine the coordinates of the calibration point in the flange center coordinate system by geometric fitting method. Second, the coordinate transformation between the robot flange coordinate system and the base coordinate system is accomplished by simple calculation. Finally, the transformation matrix between the treatment room coordinate system and the robot coordinate system is calculated by using the best fitting algorithm in Spatial Analyzer software. The unification of the coordinate system is completed, and the accuracy of the unified coordinate system is verified. The practical application in HIMM (Heavy Ion Medical Machine) shows that the coordinate unification method simplifies the conversion between treatment room and the robot system of heavy ion therapy system. Moreover, the calibration accuracy is good and the calibration efficiency is high. This method of coordinate unification is easy to operate in heavy ion therapy system and other industrial applications.
-
Key words:
- Heavy Ion Medical Machine /
- treatment room /
- robot /
- coordinate transformation /
- laser tracker
-
重离子治癌是当今世界上公认的最先进的癌症放疗技术,由中国科学院近代物理研究所自主研制的医用重离子加速器装置,打破了发达国家对大型高尖端医疗器械的垄断,使中国成为了世界上第四个拥有重离子治癌技术的国家[1]。肿瘤患者入院完成CT扫描定位后,医生在治疗计划中标记出肿瘤位置并附上定位信息位置图片,方便治疗过程中定位。在治疗过程中,患者固定到床板上以后,用手控器控制治疗床到靶区验证位置,可以通过患者体外标记与激光线指示的重合度来判断靶区位置是否正确,然后再通过影像系统来拍取影像图片。比对实际影像图片位置和治疗计划的定位位置,通过机器人控制系统的微调功能,使患者病灶靶区与治疗位置与粒子射线照射位置严密吻合,一切准备就绪后,根据患者治疗计划完成治疗[2]。在此过程中,摆位参考的激光灯代表的是治疗室等中心坐标系,DR拍照对比后根据偏差发出的指令是依据影像系统里面的DR坐标系,而机器人则是根据机器人坐标系完成移动。所以,为使放疗医师高效准确的完成摆位,上述几个坐标系的统一尤为重要。而获取治疗室{ISO}坐标系与机器人基坐标系的转换关系是实现上述坐标系统一的基础。
文献[3]中的坐标转换方法是通过控制机器人做三次单轴旋转运动,对机器人单轴转动产生的圆弧轨迹进行空间圆拟合即可得到机器人基坐标系的方向向量,再通过几何关系反推出机器人基坐标系原点在激光跟踪仪坐标系下的坐标。文献[4-5]是控制机器人沿基坐标系各个坐标轴方向做平移运动,通过拟合平移运动的轨迹直线得到机器人基坐标系各个坐标轴在激光跟踪仪坐标系下的方向向量,再进一步求解平移参数。文献[6]通过控制机器人运动并采集6个点,先基于距离约束的方法计算出运动点在机器人基坐标系中的坐标,再基于罗德里格矩阵的最小二乘迭代法完成了基坐标系和激光跟踪仪坐标系的坐标转换。文献[7]考虑到公共点的空间几何分布对转换参数求解精度的影响,基于距离约束与利用最小二乘法完成了坐标转换。文献[8]基于象限分布的公共点选取方法选取了公共点,解算出激光跟踪仪坐标系和机器人坐标系的转换参数,转换精度和稳定性都优于随机公共点组合。本文提出了一种用激光跟踪仪以及Spatial Analyzer软件就可以实现治疗室{ISO}坐标系与机器人运动坐标系的转换方法,并验证了转换精度,较以上文献中所述方法进一步简化,计算量小、更容易操作,效率高,更加适合于工业实际应用。
1. 坐标系统一方法
治疗室{ISO}坐标系统一于碳离子治疗系统主坐标系[9],也是后期放疗的基准坐标系,由固定在治疗室四周墙面上的控制网靶标点确定。基坐标系{B}是固连在机器人基座上的坐标系,是其他用户坐标系的参考基准;法兰盘坐标系{E}是固连在机器人末端法兰盘中心的坐标系,它是其他工具坐标系的参考基准[6]。
在机器人末端治疗床上固定一点P为待测点。激光跟踪仪可以直接测量出P点在治疗室坐标系下的坐标PISO,同时可以通过机器人基坐标系和机器人末端法兰盘坐标系之间的转化获得P在机器人基坐标系下的坐标PB,求得PISO和PB两者之间进行坐标变换,便可在机器人中设置新的用户坐标系,使机器人最终的运动坐标系与治疗室{ISO}坐标系统一。
坐标系之间的变换可用齐次变换矩阵来表示。
设:
P∗ISO=[PISO1] ,P∗B=[PB1] ,P∗E=[PE1] ,TBISO=[RBISOPBISO0001] ,TEB=[REBPEB0001] 则坐标之间的变换可表示为
P∗ISO=TBISOP∗B (1) P∗B=TEBP∗E (2) 式中:
PE 是点P 在机器人法兰坐标系{E}中的坐标(待求),TBISO 为在{ISO}坐标系下机器人基坐标系的齐次转换矩阵(待求);RBISO 为{ISO}坐标系下机器人基坐标系的旋转转换矩阵;PBISO 为{ISO}坐标系下机器人基坐标系原点的坐标;TEB 为机器人基坐标系下法兰盘坐标系的齐次变换矩阵;REB 为机器人基坐标系下的法兰盘中心坐标系的旋转转换矩阵;PEB 为机器人基坐标系下机器人法兰盘坐标系原点的坐标。若在机器人示教器编程时,将法兰坐标系{E}相对于基坐标系{B}的旋转角度都置为0°,则
REB=[100010001] 设
PE=[xEyEzE] PEB=[ijk] ,则P∗B=TEBP∗E=[100i010j001k0001][xEyEzE1]=[i+xEj+yEk+zE1] (3) 即,在机器人示教器编程时,将法兰坐标系{E}相对于基坐标系{B}的旋转角度都置为0°,P点在基坐标中的坐标等于法兰盘中心的在基坐标系中的坐标加上P点在法兰盘坐标系中的坐标。
1.1 法兰盘中心坐标系的标定
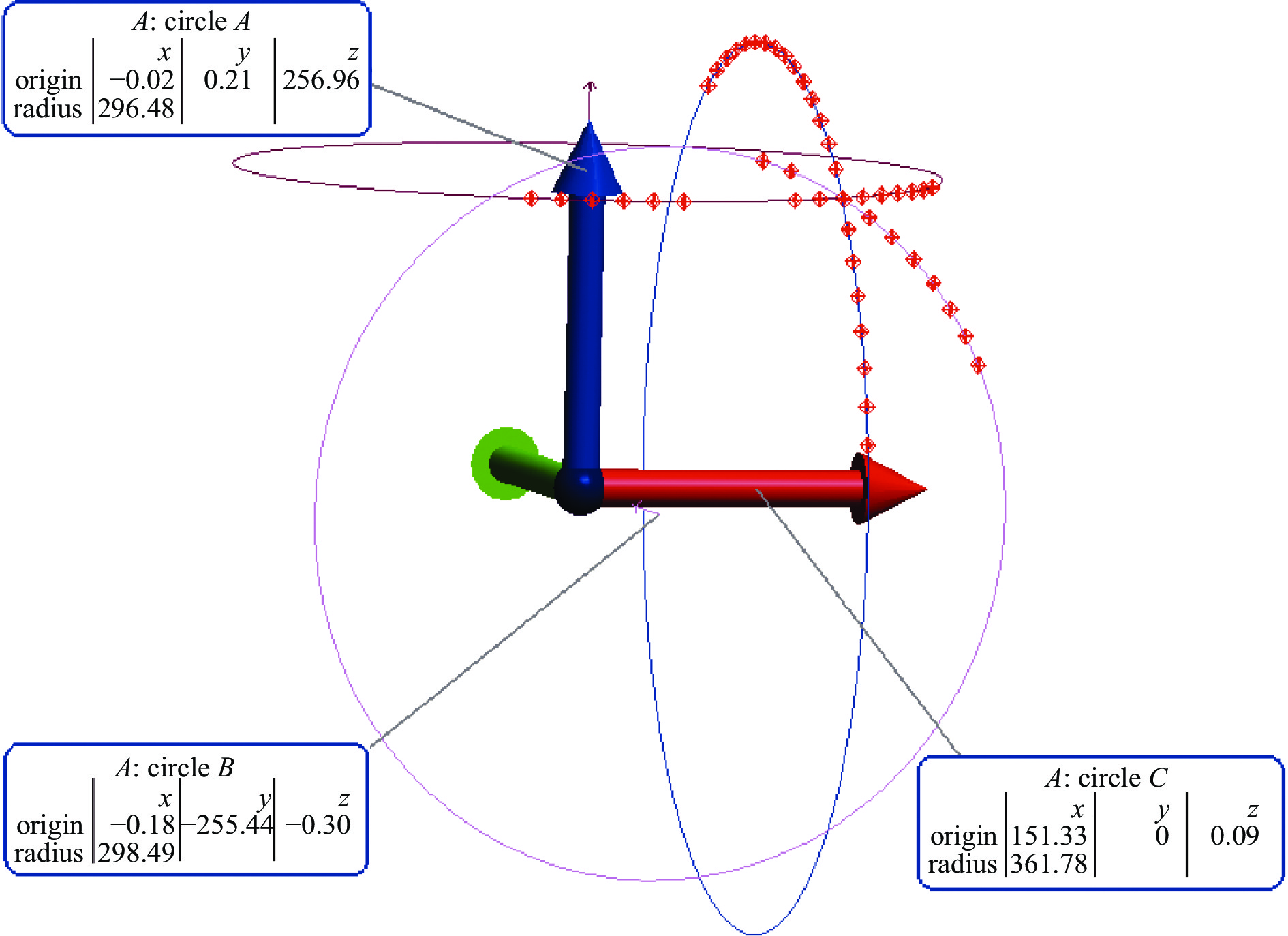
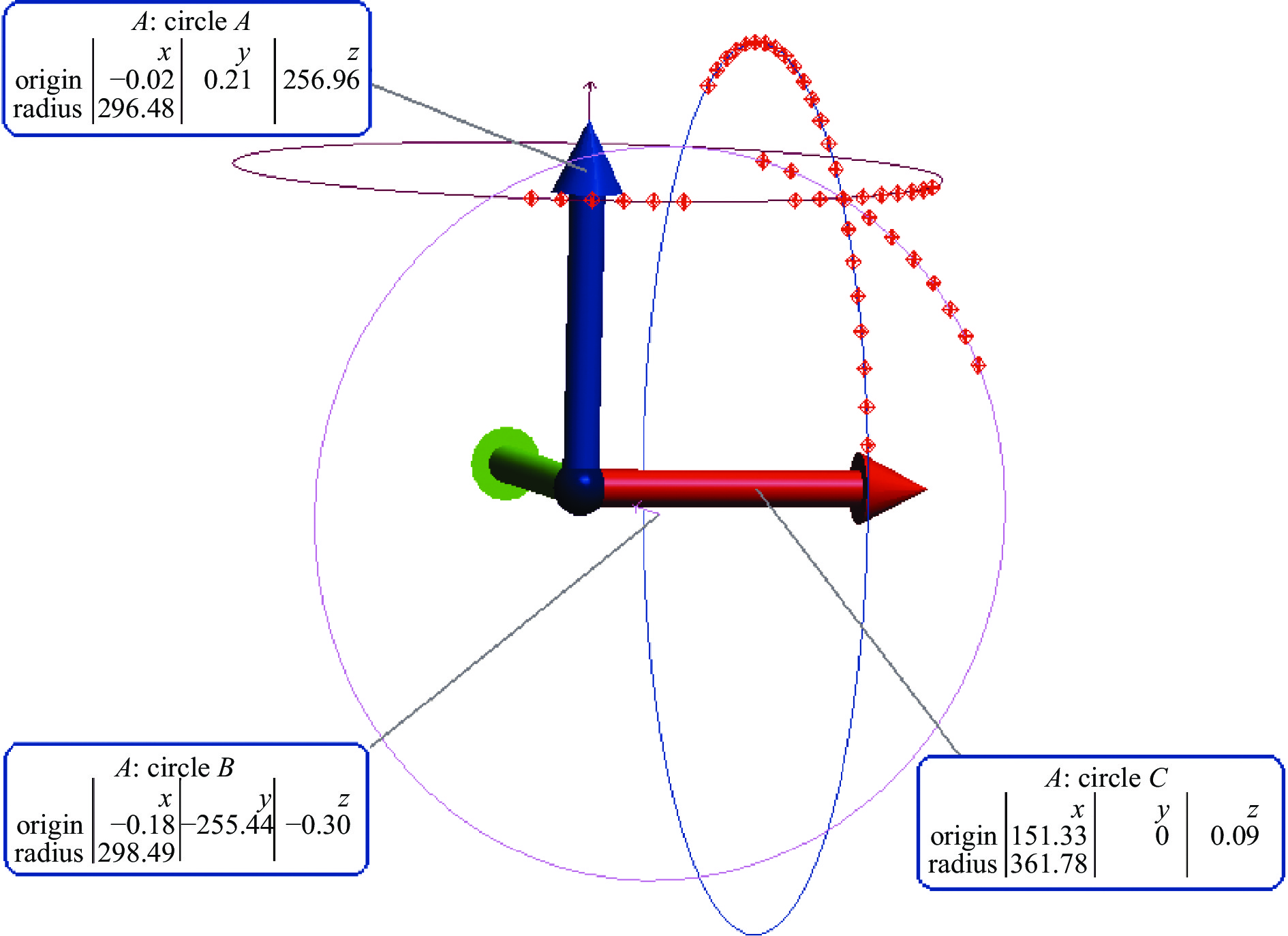
机器人法兰中心运动到某一点后,先将A、B、C三个旋转角置为0°,控制机器人沿A角方向旋转,做旋转运动时,B角、C角都为0,且无平动,将P点沿A角方向旋转轨迹拟合成圆A;用同样的方法,控制机器人沿B角和C角方向旋转,得到P点沿B角方向和C角方向旋转轨的迹分别拟合成圆B和圆C;三条轨迹拟合成球形,球心记为O点。以O为原点,圆A的法向为z轴,圆B的法向为y轴, z轴和y轴的正向与机器人在这两个方向上运动的正向一致,建立坐标系{E*}。由圆C、B、A的圆心在{E*}中的坐标,可得到点P在法兰盘中心坐标系{E}中的坐标
PE 。1.2 基座标系与治疗室坐标系转换
控制治疗床上固定点P运动n(n≥4)个位置,测量每个位置待测P点在{ISO}坐标系中的坐标
PISO ,记录每个位置机器人示教器上的坐标读数PEB ,由式(3)计算出待测点在机器人基座标系中每个位置对应的P点的坐标,再利用Spatial Analyzer软件中的最佳拟合算法求得{ISO}坐标系下机器人基坐标系{B}的齐次转换矩阵TBISO ,根据此坐标变换,便可在机器人系统中设置新的用户坐标系,使其统一到治疗室{ISO}坐标系中。2. 标定测量
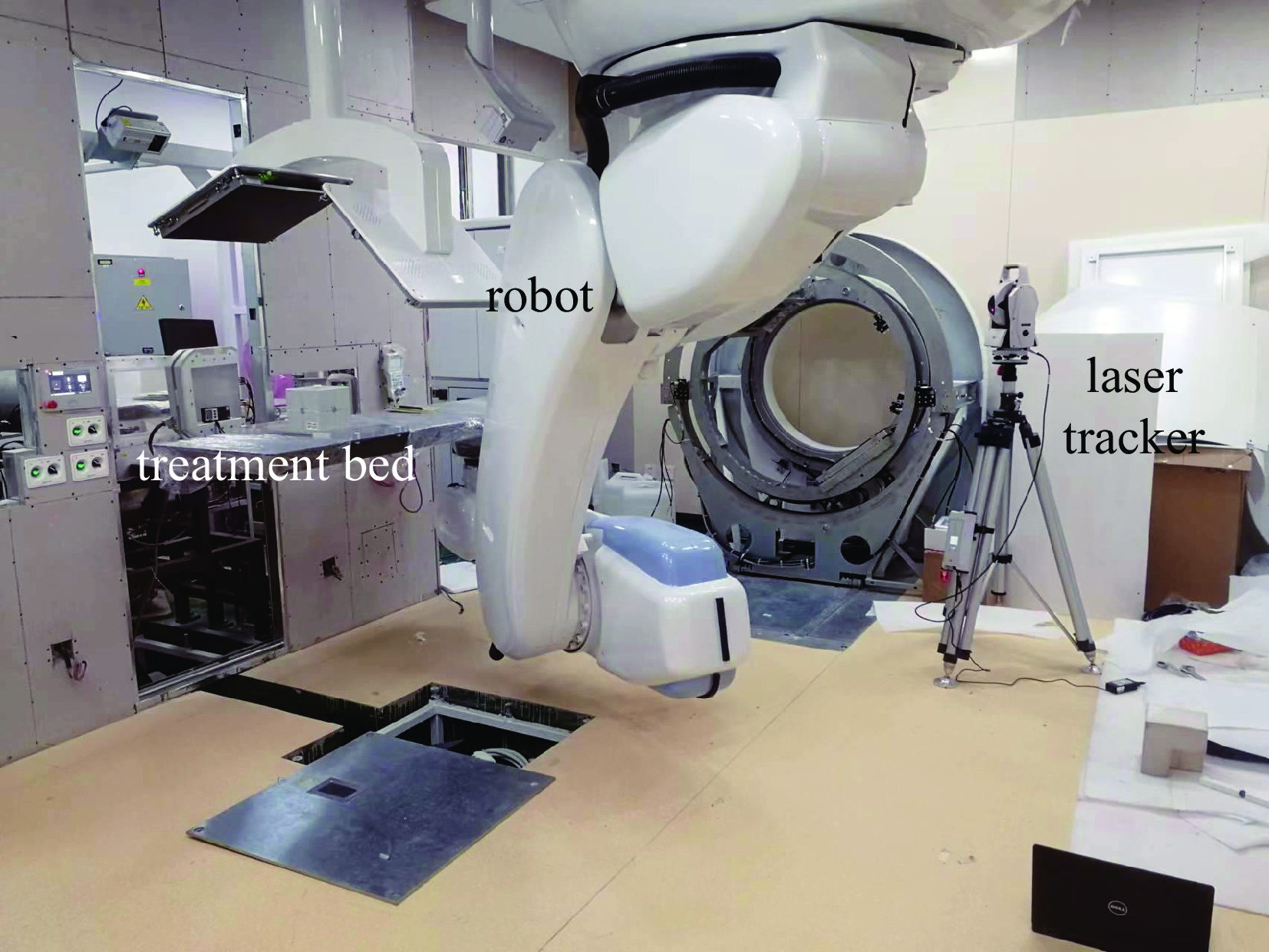
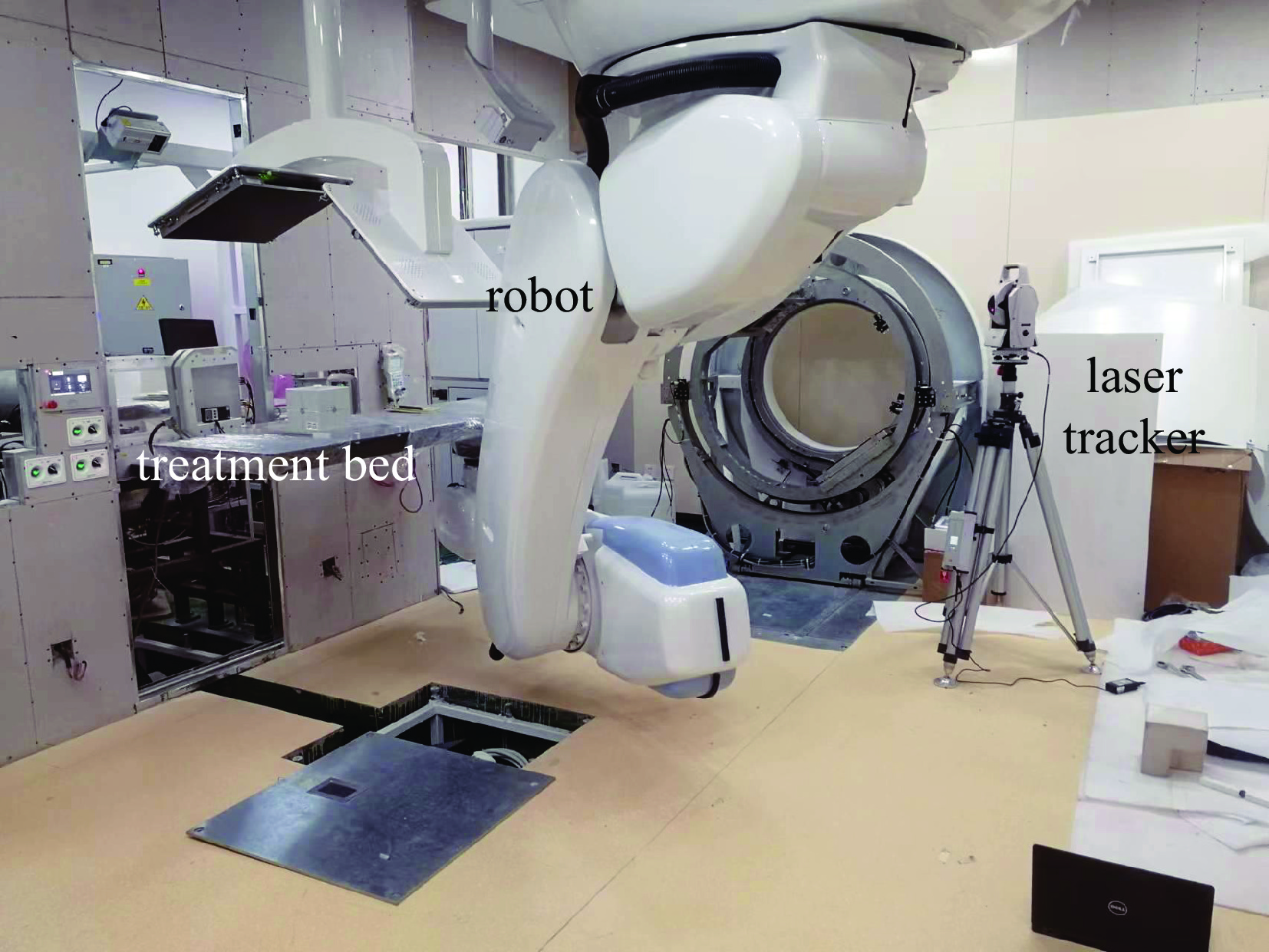
如图1所示,兰州重离子医院碳离子治疗系统治疗室配置KUKA KR 500 R2830机器人,悬挂安装。在机器人末端法兰盘上固定治疗床。测量中用到的激光跟踪仪为 Leica AT403,配合直径38.1 mm的靶标球使用,测量精度为(15+6) μm/m。将靶标球固定在治疗床上。激光跟踪仪架设到合适的位置,保证整个测量过程中通视良好。整个测量过程中只架设1次。
2.1 法兰盘坐标系的标定
(1)通过激光跟踪仪测量治疗室墙面上的控制网靶标点,将跟踪仪定位到治疗室等中心{ISO}坐标系下。
(2)如图2所示,按照1.1描述的方法采集数据,本次测量在A、B、C三个方向共采集48个点。拟合得到球O,圆A、圆B、圆C、建立坐标系{E*},在坐标系{E*}中,圆A、B、C的圆心坐标为(−0.02,0.21,256.96)、(−0.18,−255.44,−0.30)、(151.33,0.00,0.09)。所以,点P在法兰盘中心坐标系{E}中的坐标
PE 为(151.33,−255.44,256.96)。2.2 基座标系与治疗室坐标系转换标定
按照1.2描述的方法控制机器人运动并采集数据,本次测量,机器人共运动了18个位置。示教器上法兰盘位姿参数和激光跟踪仪测得的坐标数据如表1和表2。根据式(3)计算得标定点在机器人基坐标系下的坐标如表3所示。
表 1 示教器上法兰盘中心位姿参数Table 1. Center position parameters of the flange on the teach pendantNo. x/mm y/mm z/mm A/(°) B/(°) C/(°) PEB1 764.93 1378.01 −2187.06 0 0 0 PEB2 964.93 1378.01 −2187.06 0 0 0 PEB3 964.93 1578.01 −2187.06 0 0 0 PEB4 764.93 1578.01 −2187.06 0 0 0 PEB5 564.93 1578.01 −2187.06 0 0 0 PEB6 564.93 1378.01 −2187.06 0 0 0 PEB7 564.93 1178.01 −2187.06 0 0 0 PEB8 764.93 1178.01 −2187.06 0 0 0 PEB9 964.93 1178.01 −2187.06 0 0 0 PEB10 964.93 1178.01 −1987.06 0 0 0 PEB11 964.93 1378.01 −1987.06 0 0 0 PEB12 964.93 1578.01 −1987.06 0 0 0 PEB13 764.93 1578.01 −1987.06 0 0 0 PEB14 564.93 1578.01 −1987.06 0 0 0 PEB15 564.93 1378.01 −1987.06 0 0 0 PEB16 564.93 1178.01 −1987.06 0 0 0 PEB17 764.93 1178.01 −1987.06 0 0 0 PEB18 764.93 1378.01 −1987.06 0 0 0 表 2 标定点在治疗室{ISO}坐标系中的坐标Table 2. Coordinates of the calibration point in the ISO coordinate system of the treatment roomNo. x/mm y/mm z/mm PISO1 −817.51 −638.78 −485.96 PISO2 −1017.28 −639.84 −485.32 PISO3 −1016.9 −640.17 −285.34 PISO4 −817.03 −639.09 −285.97 PISO5 −617.22 −637.97 −286.48 PISO6 −617.58 −637.71 −486.5 PISO7 −617.95 −637.39 −686.42 PISO8 −817.79 −638.49 −685.91 PISO9 −1017.65 −639.55 −685.27 PISO10 −1018.77 −439.62 −684.97 PISO11 −1018.44 −439.89 −484.95 PISO12 −1017.99 −440.14 −285.03 PISO13 −818.09 −439.06 −285.59 PISO14 −618.24 −438.03 −286.13 PISO15 −618.62 −437.72 −486.17 PISO16 −619 −437.44 −686.15 PISO17 −818.92 −438.51 −685.54 PISO18 −818.58 −438.8 −485.58 表 3 标定点在机器人基座标系下的坐标Table 3. Coordinates of the calibration point under the robot base systemNo. x/mm y/mm z/mm PB1 916.26 1122.57 −1930.1 PB2 1116.26 1122.57 −1930.1 PB3 1116.26 1322.57 −1930.1 PB4 916.26 1322.57 −1930.1 PB5 716.26 1322.57 −1930.1 PB6 716.26 1122.57 −1930.1 PB7 716.26 922.57 −1930.1 PB8 916.26 922.57 −1930.1 PB9 1116.26 922.57 −1930.1 PB10 1116.26 922.57 −1730.1 PB11 1116.26 1122.57 −1730.1 PB12 1116.26 1322.57 −1730.1 PB13 916.26 1322.57 −1730.1 PB14 716.26 1322.57 −1730.1 PB15 716.26 1122.57 −1730.1 PB16 716.26 922.57 −1730.1 PB17 916.26 922.57 −1730.1 PB18 916.26 1122.57 −1730.05 按照本文提出的方法:用Spatial Analyzer软件里的最佳拟合算法,用表2和表3的数据求得齐次转换矩阵为
TBISO=[−0.9999820.002418−0.00540185.668709−0.005405−0.0015030.9999841297.9186820.002410.9999960.001516−1607.7380520001] (4) 坐标转换精度如表4所示。其中Δxmax,Δymax,Δzmax分别为x,y,z方向的最大误差;δRMS-x、δRMS-y、δRMS-z分别为x、y、z方向的均方根误差;ΔMag-max为最大空间点位误差,ΔRMS-mag为空间点位均方根误差。
表 4 坐标转换精度Table 4. Coordinate conversion accuracyΔxmax/mm δRMS-x Δymax/mm δRMS-y Δzmax/mm δRMS-z ΔMag-max/mm ΔRMS-mag/mm 0.26 0.14 0.06 0.03 0.15 0.09 0.3 0.16 按照转换矩阵
TBISO ,在机器人系统中建立新的用户坐标系{ISO*}。实现了治疗室{ISO}坐标系与机器人基坐标系的坐标系的统一。2.3 坐标系转换精度验证
控制机器人分别沿机器人基坐标系{B}和用户坐标系{ISO*}的x、y、z轴方向以100 mm平动,形成多个点的点阵,以验证通过转换得到的用户坐标系{ ISO*}和治疗室{ISO}坐标系的统一程度。
如图3所示,图3(a)为坐标系转换前后x方向两坐标系统一情况,图3(b)坐标系转换前后y方向两坐标系统一情况,图3(c)坐标系转换前后z方向两坐标系统一情况,控制机器人分别沿基坐标系{B}的x、y、z方向单方向以100 mm为步长平动时,在{ISO}坐标系中测量得到移动距离的最大误差是:x方向0.11 mm,y方向0.03 mm,z方向0.04 mm;单方向平动100 mm时,在其他两个方向引起的最大分量误差:x方向为−0.56 mm,y方向为0.56 mm,z方向为0.32 mm。控制机器人分别沿新用户坐标系{ISO*}的x、y、z方向单方向以100 mm为步长平动时,在{ISO}坐标系中测量得到移动距离的最大误差是:x方向0.2 mm,y方向0.07 mm,z方向0.09 mm;单方向的平动100 mm时,在其他两个方向引起分量的最大误差:x方向0.24 mm,y方向0.12 mm,z方向0.08 mm。显然,x方向的误差较大,这与坐标转换精度表4的结果也是一致的,同时,我们发现在点3、6、10、11、15、16、17,x方向的误差变大,而在这几个点,机器人正好改变了运动方向,因此x方向的误差不全是坐标转换误差,还有反向间隙等机械原因。如图3(b)(c)所示,坐标系转换后,机器人沿新的用户坐标系的y和z方向运动的误差较小,且在机器人改变运动方向时,误差没有明显增大。可以看出,坐标系转换以后新建的用户坐标系较机器人基座标系{ISO*}与治疗室{ISO}坐标系的一致性得到了明显的提高。
 图 3 坐标系转换前后的误差对比Figure 3. Error comparison before and after the conversion of the coordinate system
图 3 坐标系转换前后的误差对比Figure 3. Error comparison before and after the conversion of the coordinate system3. 结 论
本文提出了一种用激光跟踪仪和其配套软件Spatial Analyzer将机器人基坐标系与治疗室坐标系统一的新方法,采用测量拟合的方法得到标定点在法兰盘中心坐标系的坐标,在法兰盘中心坐标系向基坐标系转换的过程中,通过控制机器人法兰盘的位姿,将复杂的多个矩阵的运算简化为加减运算,然后用Spatial Analyzer软件中的最佳拟合算法,计算出机器人基坐标系与治疗室坐标系的之间的转换矩阵,最后,在机器人控制系统中设置新的用户坐标系,实现了机器人基坐标系与治疗室{ISO}坐标系的转换,并验证了坐标系统一的精度。通过工程实际应用验证,文章所述的新方法不但简化了标定点在法兰盘中心坐标系中坐标的标定,还简化了法兰盘中心坐标系和基坐标系转换的计算过程,全程只用到激光跟踪仪及其配套软件且无其他复杂运算,而且标定精度良好、效率更高,更加符合重离子治疗等工业应用。 -
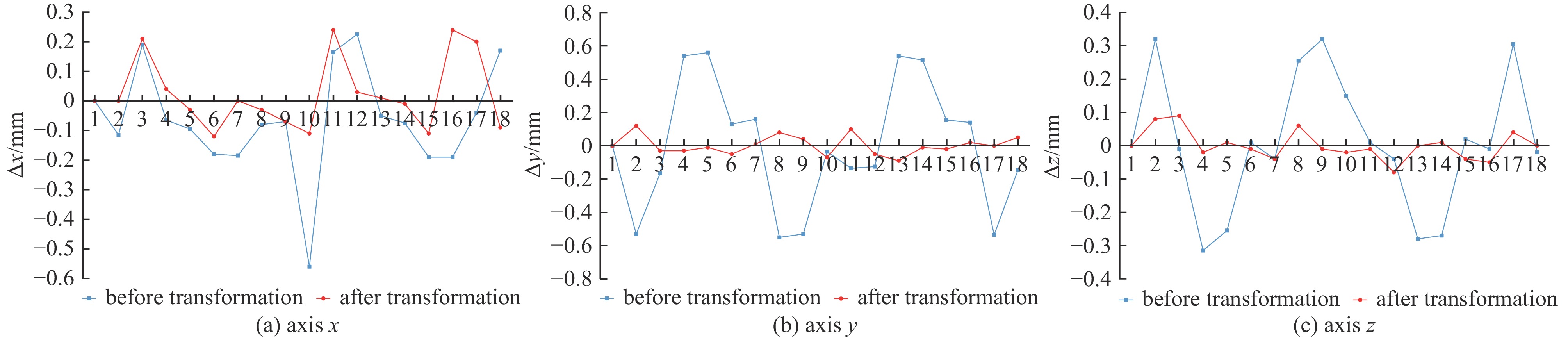
图 3 坐标系转换前后的误差对比
Figure 3. Error comparison before and after the conversion of the coordinate system
表 1 示教器上法兰盘中心位姿参数
Table 1. Center position parameters of the flange on the teach pendant
No. x/mm y/mm z/mm A/(°) B/(°) C/(°) PEB1 764.93 1378.01 −2187.06 0 0 0 PEB2 964.93 1378.01 −2187.06 0 0 0 PEB3 964.93 1578.01 −2187.06 0 0 0 PEB4 764.93 1578.01 −2187.06 0 0 0 PEB5 564.93 1578.01 −2187.06 0 0 0 PEB6 564.93 1378.01 −2187.06 0 0 0 PEB7 564.93 1178.01 −2187.06 0 0 0 PEB8 764.93 1178.01 −2187.06 0 0 0 PEB9 964.93 1178.01 −2187.06 0 0 0 PEB10 964.93 1178.01 −1987.06 0 0 0 PEB11 964.93 1378.01 −1987.06 0 0 0 PEB12 964.93 1578.01 −1987.06 0 0 0 PEB13 764.93 1578.01 −1987.06 0 0 0 PEB14 564.93 1578.01 −1987.06 0 0 0 PEB15 564.93 1378.01 −1987.06 0 0 0 PEB16 564.93 1178.01 −1987.06 0 0 0 PEB17 764.93 1178.01 −1987.06 0 0 0 PEB18 764.93 1378.01 −1987.06 0 0 0  下载: 导出CSV
下载: 导出CSV
表 2 标定点在治疗室{ISO}坐标系中的坐标
Table 2. Coordinates of the calibration point in the ISO coordinate system of the treatment room
No. x/mm y/mm z/mm PISO1 −817.51 −638.78 −485.96 PISO2 −1017.28 −639.84 −485.32 PISO3 −1016.9 −640.17 −285.34 PISO4 −817.03 −639.09 −285.97 PISO5 −617.22 −637.97 −286.48 PISO6 −617.58 −637.71 −486.5 PISO7 −617.95 −637.39 −686.42 PISO8 −817.79 −638.49 −685.91 PISO9 −1017.65 −639.55 −685.27 PISO10 −1018.77 −439.62 −684.97 PISO11 −1018.44 −439.89 −484.95 PISO12 −1017.99 −440.14 −285.03 PISO13 −818.09 −439.06 −285.59 PISO14 −618.24 −438.03 −286.13 PISO15 −618.62 −437.72 −486.17 PISO16 −619 −437.44 −686.15 PISO17 −818.92 −438.51 −685.54 PISO18 −818.58 −438.8 −485.58
下载: 导出CSV
表 3 标定点在机器人基座标系下的坐标
Table 3. Coordinates of the calibration point under the robot base system
No. x/mm y/mm z/mm PB1 916.26 1122.57 −1930.1 PB2 1116.26 1122.57 −1930.1 PB3 1116.26 1322.57 −1930.1 PB4 916.26 1322.57 −1930.1 PB5 716.26 1322.57 −1930.1 PB6 716.26 1122.57 −1930.1 PB7 716.26 922.57 −1930.1 PB8 916.26 922.57 −1930.1 PB9 1116.26 922.57 −1930.1 PB10 1116.26 922.57 −1730.1 PB11 1116.26 1122.57 −1730.1 PB12 1116.26 1322.57 −1730.1 PB13 916.26 1322.57 −1730.1 PB14 716.26 1322.57 −1730.1 PB15 716.26 1122.57 −1730.1 PB16 716.26 922.57 −1730.1 PB17 916.26 922.57 −1730.1 PB18 916.26 1122.57 −1730.05
下载: 导出CSV
表 4 坐标转换精度
Table 4. Coordinate conversion accuracy
Δxmax/mm δRMS-x Δymax/mm δRMS-y Δzmax/mm δRMS-z ΔMag-max/mm ΔRMS-mag/mm 0.26 0.14 0.06 0.03 0.15 0.09 0.3 0.16
下载: 导出CSV
-
[1] 陈文军, 马力祯, 蔡国柱, 等. 武威重离子治癌装置高能束线的准直安装[J]. 强激光与粒子束, 2015, 27:085102 doi: 10.11884/HPLPB201527.085102Chen Wenjun, Ma Lizhen, Cai Guozhu, et al. Alignment of high energy line for Wuwei Heavy Ion Medical Machine[J]. High Power Laser and Particle Beams, 2015, 27: 085102 doi: 10.11884/HPLPB201527.085102 [2] 张远月. 质子重离子治疗过程中的机器人定位精度控制技术研究[J]. 机电信息, 2017(15):96-99Zhang Yuanyue. Research on robot positioning accuracy control technology during proton heavy ion therapy[J]. Mechanical and Electrical Information, 2017(15): 96-99 [3] 张博, 魏振忠, 张广军. 机器人坐标系与激光跟踪仪坐标系的快速转换方法[J]. 仪器仪表学报, 2010, 31(9):1986-1990Zhang Bo, Wei Zhenzhong, Zhang Guangjun. Rapid coordinate transformation between a robot and a laser tracker[J]. Chinese Journal of Scientific Instrument, 2010, 31(9): 1986-1990 [4] 冯晓波. 机器人准确制孔技术研究[D]. 杭州: 浙江大学, 2011: 45-50Feng Xiaobo. Research on robot precision drilling[D]. Hangzhou: Zhejiang University, 2011: 45-50 [5] 齐立哲, 陈磊, 王伟, 等. 基于激光跟踪仪的机器人误差测量系统标定[J]. 制造技术与机床, 2012(10):90-94 doi: 10.3969/j.issn.1005-2402.2012.10.028Qi Lizhe, Chen Lei, Wang Wei, et al. The calibration for industrial robot’s position error measuring system based on the laser tracker[J]. Manufacturing Technology & Machine Tool, 2012(10): 90-94 doi: 10.3969/j.issn.1005-2402.2012.10.028 [6] 向民志, 范百兴, 李祥云, 等. 激光跟踪仪与机器人坐标系转换方法研究[J]. 航空制造技术, 2018, 61(1/2):98-101Xiang Minzhi, Fan Baixing, Li Xiangyun, et al. Study on coordinate transformation between a laser tracker and a robot[J]. Aeronautical Manufacturing Technology, 2018, 61(1/2): 98-101 [7] 徐福乾, 范百兴, 段童虎, 等. 快速转换激光跟踪仪与机器人坐标系的方法[J]. 信息工程大学学报, 2022, 23(2):179-183Xu Fuqian, Fan Baixing, Duan Tonghu, et al. Rapid coordinate transformation method between a laser tracker and a robot[J]. Journal of Information Engineering University, 2022, 23(2): 179-183 [8] 徐福乾, 范百兴, 黄赫, 等. 激光跟踪仪与机器人坐标转换公共点的选取方法[J]. 测绘工程, 2022, 31(3):31-39Xu Fuqian, Fan Baixing, Huang He, et al. Common point selection in coordinate transformation between a laser tracker and a robot.[J]. Engineering of Surveying and Mapping, 2022, 31(3): 31-39 [9] 蔡国柱. 大型离子加速器先进准直安装方法研究[D]. 北京: 中国科学院大学, 2014: 99-100Cai Guozhu. Research on alignment and installation of large ion accelerator[D]. Beijing: The University of Chinese Academy of Sciences, 2014: 99-100 -





















 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 502
- HTML全文浏览量: 217
- PDF下载量: 45
- 被引次数: 0
