

Development of the magnetron double energy solid-state modulator
-
摘要: 海关安检双能加速器是由磁控管驱动的,在双能运行时,由于磁控管的静态工作阻抗及脉冲电流波形幅值一般相差比较大,造成脉冲电流顶部波形畸变,不能满足海关安检需要。为此采用“双回路并联电路拓扑+并联IGBT固态开关技术+高变比脉冲变压器技术+波形校正技术”研制了用于双能加速器的固态调制器,实现高低能交替输出脉冲。结果显示,在工作电流在70~120 A范围内时,高低能交替工作的磁控管脉冲电流波形都为比较理想的梯形波,其电流波形的平顶相对变化小于5%。Abstract: Double energy accelerator used in custom security monitoring is powered by the high-power magnetron, the top of pulse current waveform through the magnetron varies greatly in the double energy operation mode of the ordinary solid-state modulator due to nonlinear impedance of the magnetron, thus it is difficult to precisely distinguish contraband from the commodity in the cargo. To make the top of the pulse current waveform through the magnetron used in the double energy accelerator flat in the double energy operation mode, we developed a solid state modulator based on dual-loop parallel circuit topology, parallel IGBT solid state switch, high ratio pulse transformer technology and waveform correction technique for double energy accelerator. When the operating current through the magnetron is in the range of 70~120 A , this solid state modulator can output quasi-trapezoid current waveform in the double energy operation mode, and the relative top fluctuation of the pulse waveforms through the magnetron is less than 5%.
-
Key words:
- double energy /
- magnetron /
- solid state modulator /
- waveform correction /
- pulse current
-
随着执行任务复杂程度的提高以及电磁环境的日益复杂,无人机的可靠性、稳定性和安全性都受到了影响。电磁干扰信号通过前门耦合与后门耦合的方式进入无人机系统内部[1],极大影响了无人机的工作性能。线缆耦合作为电磁信号进入无人机系统内部的主要方式之一[2],其在无人机系统中耦合特征的研究对于无人机电磁效应分析具有重要意义。
近年来,针对线缆耦合特征研究,许多学者在理论与实验方面开展了相关研究。董昱青等人[3]针对窄带高功率微波辐照下线缆面临干扰的问题,仿真研究了NHPM辐照下裸露线缆的耦合响应特征,研究了不同中心频率、不同脉冲宽度的4种NHPM对不同长度裸露线缆耦合特征的影响;杨茂松等人[4]讨论了典型互联系统辐射与注入的等效以及在高场强下的外推条件,并对所选非线性器件是否满足实验要求进行了实验验证;孙江宁等人[5]从非屏蔽多芯线缆单一线对大电流注入等效替代辐照模型出发,提出了单一线对的大电流注入等效辐照的试验方法,以非屏蔽四芯线为试验对象,探索了非屏蔽多芯线缆终端响应规律;季涛等人[6]基于传输线理论,建立了线缆束网络电磁耦合的拓扑模型,得出了计算复杂线缆束网络系统终端耦合电压与电流的计算方法;刘峻林等人[7]开展了高空核电磁脉冲与双层损耗土壤下线缆的耦合响应研究。在无人机电磁效应分析中,无人机复杂的物理结构严重影响了线缆耦合特征[8]。目前针对电子系统中的线缆耦合,主要开展了脉冲、连续波干扰信号对电子系统的线缆耦合数值研究[9-10],王晓明[11]针对机载综合射频系统开展了高空核电磁脉冲耦合分析与验证研究,仿真并测试了干扰对射频系统金属外壳的孔缝、互联线缆的耦合,给出了仿真与实验的对比结果,余道杰[12]等人针对无人机定位系统分析了不同耦合路径下辐照干扰耦合机理和作用机制。上述研究主要对单类型线缆在典型场景下进行的仿真分析,并未结合实际无人机系统具体物理结构以及系统中的实际布线方式对无人机系统级线缆开展耦合特征分析。
针对上述问题,本文构建了线缆电磁干扰场路联合仿真模型,分析了无人机系统中各类型线缆基本耦合特征,得到了线缆长度与敏感频点的关联关系,并进一步结合无人机复杂物理结构建立了无人机系统级线缆耦合模型,分析了基于无人机系统复杂物理结构布线方式下线缆的耦合特征,得到了辐照干扰下无人机系统线缆耦合薄弱环节。
1. 无人机系统场-线耦合模型建立
无人机飞控与外接组件主要通过线缆连接,在强电磁辐射干扰作用下,线缆会激励出感应电压和感应电流,从而引起敏感模块的故障。无人机系统普遍使用的线缆结构主要包含单芯线缆、多芯线缆、绞合线缆、带状线缆,由于线缆耦合的过程与天线类似,因此需要考虑线缆尺寸与电磁干扰信号波长之间的关系,当线缆长度与电磁波波长相比拟时,线缆耦合强度较大。旋翼无人机尺寸较小,线缆长度通常在几十厘米,因此仿真过程主要考虑尺寸在0.1~1 m长度的线缆。
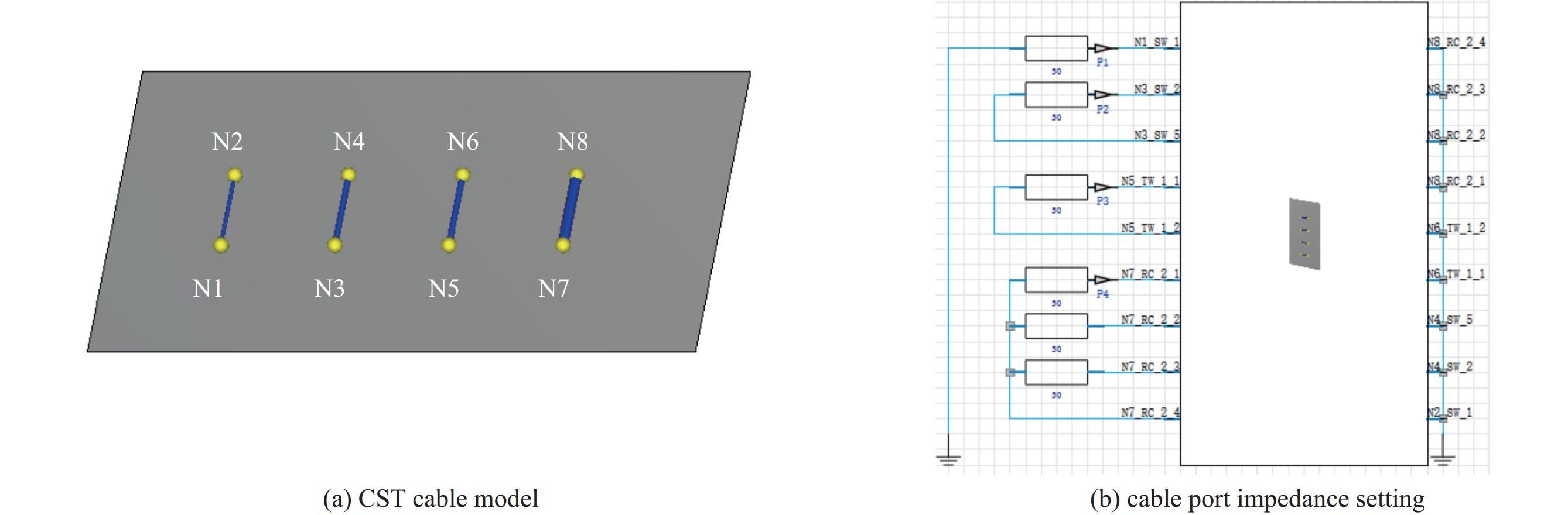
在CST电缆工作室中建立如图1所示线缆连接模型,在金属地平面上按1 m等间隔安置四种类型的线缆,分别为单芯线缆、双芯线缆、绞合线缆、带状线缆。线缆的空间布置以及端接的阻抗如图2所示,其中N1-N2为单芯线缆,N3-N4为双芯线缆,N5-N6为绞合线缆,N7-N8为带状线缆。单芯线缆的连接方式描述了不同区域的地通过线缆连接,其余三种线缆都以线束中一根线缆作为参考地,其余线缆传输信号的方式连接,所有的端接阻抗设置为
50Ω [13]。 图 2 线缆电磁干扰场路联合仿真模型Figure 2. Co-simulation model of electromagnetic interference field of cable
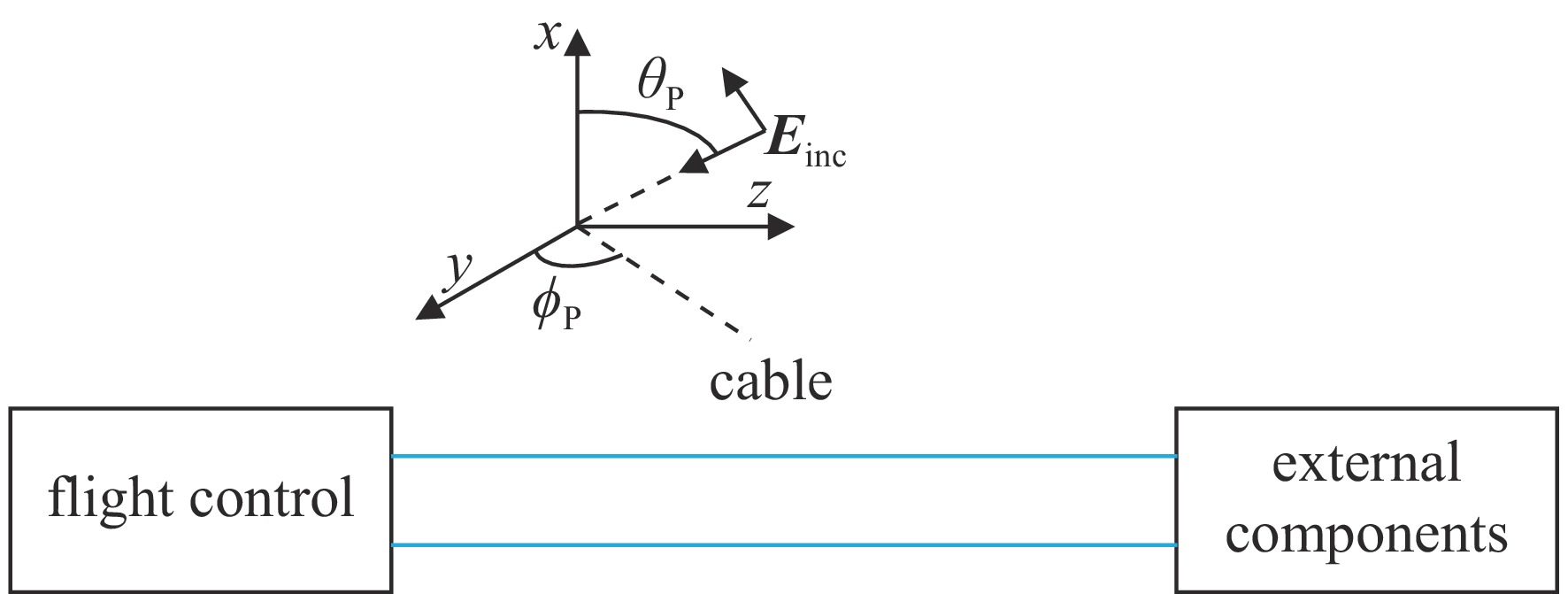
图 2 线缆电磁干扰场路联合仿真模型Figure 2. Co-simulation model of electromagnetic interference field of cable在无人机系统中,线缆场-路耦合模型可等效为一般电路模型,通过传输线方程[14-15]可求解在任意角度平面波激励下线缆场-路耦合瞬态响应,图3为无人机系统场-路耦合模型,图4为无人机系统场-路耦合等效电路模型。
 图 4 无人机系统场-路耦合等效电路模型Figure 4. Field-line coupling equivalent circuit model of an unmanned aerial vehicle system
图 4 无人机系统场-路耦合等效电路模型Figure 4. Field-line coupling equivalent circuit model of an unmanned aerial vehicle system由于辐照场的作用,在无人机场-路耦合模型中引入两个辐射源,得到等效电路模型如图4所示。
任意角度入射电磁场可表示为
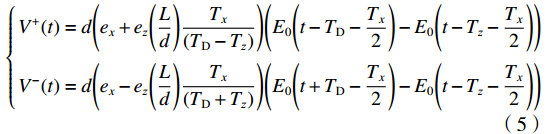
{ {\boldsymbol{E}}_{{\mathrm{inc}}}}(x,y,{\textit{z}},t) = [{e_x}{ {\boldsymbol{a}}_x} + {e_y}{ {\boldsymbol{a}}_y} + {e_{\textit{z}}}{ {\boldsymbol{a}}_{\textit{z}}}]{E_0}\Bigg(t - \dfrac{x}{{{v_x}}} - \dfrac{y}{{{v_y}}} - \dfrac{{\textit{z}}}{{{v_{\textit{z}}}}}\Bigg) (1) {v_x} = \dfrac{\omega }{{{\beta _x}}} = - \dfrac{v}{{\cos {\theta _{\mathrm{p}}}}} (2) {v_y} = \dfrac{\omega }{{{\beta _y}}} = - \dfrac{v}{{\sin {\theta _{\mathrm{p}}}\cos {\phi _{\mathrm{p}}}}} (3) {v_{\textit{z}}} = \dfrac{\omega }{{{\beta _{\textit{z}}}}} = - \dfrac{v}{{\sin {\theta _{\mathrm{p}}}\sin {\phi _{\mathrm{p}}}}} (4) 根据传输线方程,可推导得到入射场激励信号表达式为
\left\{ \begin{gathered} {V^ + }(t) = d\Bigg({e_x} + {e_{\textit{z}}}\Bigg(\dfrac{L}{d}\Bigg)\dfrac{{{T_x}}}{{({T_{\mathrm{D}}} - {T_{\textit{z}}})}}\Bigg)\Bigg({E_0}\Bigg(t - {T_{\mathrm{D}}} - \dfrac{{{T_x}}}{2}\Bigg) - {E_0}\Bigg(t - {T_{\textit{z}}} - \dfrac{{{T_x}}}{2}\Bigg)\Bigg) \\ {V^ - }(t) = d\Bigg({e_x} - {e_{\textit{z}}}\Bigg(\dfrac{L}{d}\Bigg)\dfrac{{{T_x}}}{{({T_{\mathrm{D}}} + {T_{\textit{z}}})}}\Bigg)\Bigg({E_0}\Bigg(t + {T_{\mathrm{D}}} - \dfrac{{{T_x}}}{2}\Bigg) - {E_0}\Bigg(t - {T_{\textit{z}}} - \dfrac{{{T_x}}}{2}\Bigg)\Bigg) \\ \end{gathered} \right. (5) 无人机系统线缆终端响应表达式为
\left\{ \begin{gathered} V(0,t) = \dfrac{{{R_{\mathrm{S}}}}}{{{R_{\mathrm{S}}} + {Z_{\mathrm{C}}}}}\Bigg({{\mathit{\Gamma}} _{\mathrm{L}}}\displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ + }(t - (2i + 1){T_{\mathrm{D}}})} - \displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ - }(t - (2i + 1){T_{\mathrm{D}}})} \Bigg) \\ V(L,t) = \dfrac{{{R_{\mathrm{L}}}}}{{{R_{\mathrm{L}}} + {Z_{\mathrm{C}}}}}\Bigg(\displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ + }(t - (2i){T_{\mathrm{D}}})} - {{\mathit{\Gamma }}_{\mathrm{S}}}\displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ - }(t - (2i){T_{\mathrm{D}}})} \Bigg) \\ \end{gathered} \right. (6) 式中:
{T_{{{\mathrm{D}}}}} = \dfrac{L}{v} ,{R_{\rm{S}}} 为始端阻抗,{R_{\rm{L}}} 为终端阻抗,{Z_{\rm{C}}} 为电路容性阻抗,\alpha = {{\mathit{\Gamma}} _{\rm{S}}}{{\mathit{\Gamma}} _{\rm{L}}} ,L为无人机线缆长度,{T_{{x}}} = \dfrac{L}{{{v_{{x}}}}} ,{T_{\textit{z}}} = \dfrac{L}{{{v_{\textit{z}}}}} ,{{\mathit{\Gamma}} _{\rm{S}}} = \dfrac{{{R_{\rm{S}}} - {Z_{\rm{C}}}}}{{{R_{\rm{S}}} + {Z_{\rm{C}}}}} ,{{\mathit{\Gamma}} _{\rm{L}}} = \dfrac{{{R_{\rm{L}}} - {Z_{\rm{C}}}}}{{{R_{\rm{L}}} + {Z_{\rm{C}}}}} ,公式(5)与公式(6)联立求得无人机系统场-路耦合终端响应。2. 无人机系统线缆电磁效应仿真分析
2.1 无人机线缆耦合仿真分析
在无人机多类型线缆场路联合仿真分析中,设置线缆为单芯线缆,线芯为直径0.5 mm的金属铜,外部由PVC绝缘层包裹,线缆的截面直径为1 mm,双芯线缆为两根单芯线缆并排放置,绞合线缆为两根单芯线缆按照20 mm旋转一圈设置,带状线为8根单芯线缆并排放置,线缆间隔为2.3 mm。
考虑实际情况下电磁干扰信号入射角度的随机性,仿真平面波入射场景,线缆长度为1 m,干扰信号为高斯宽带信号,传播矢量
{\boldsymbol{k}} = (0,0, - 1) ,电场分量方向为{\boldsymbol{e}} = (\cos \theta ,\sin \theta ,0) ,参数角\theta 间隔15°进行参数扫描,表达式为f(t) = {\exp[ - (t - 0.001\;6)^2}/4] ,时域单位为μs,幅度为1 V,带宽为10−1 GHz,仿真结果如图5、图6所示。时域仿真结果表明,电场矢量与线缆所在平面平行时,耦合的峰值电压最大,其中单芯线缆直连的情况描述的是地到地的连接,因此感应电压较低,大小为0.016 V。其余三种情况均为常用的信号线的连接方式,如无人机外接导航定位模块采用的USART接口使用双绞线的N5-N6的连接方式。由于仿真的四种线缆均无屏蔽层,因此线缆端口处的感应电压较大,双芯线缆与双绞线缆感应电压峰值为0.14 V,带状线缆感应电压峰值为0.1 V。频域结果表明,不同类型长度相等的线缆谐振频点相同,1 m长线缆的谐振频点在100 MHz与200 MHz。 图 5 线缆端口时域感应电压与入射电磁波角度的关系Figure 5. Relationship between the time-domain induced voltage of a cable port and the angle of the incident electromagnetic wave
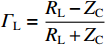
图 5 线缆端口时域感应电压与入射电磁波角度的关系Figure 5. Relationship between the time-domain induced voltage of a cable port and the angle of the incident electromagnetic wave 图 6 线缆端口频域感应电压与入射电磁波角度的关系Figure 6. Relationship between the frequency-domain induced voltage of the cable port and the angle of the incident electromagnetic wave
图 6 线缆端口频域感应电压与入射电磁波角度的关系Figure 6. Relationship between the frequency-domain induced voltage of the cable port and the angle of the incident electromagnetic wave根据传输线理论可知,线缆谐振频点与线缆长度有关。结合上述频域仿真结果,进一步研究耦合特征与线缆长度的关系:以20 cm为间隔,仿真分析长度20~100 cm的线缆耦合特征。考虑平面波正入射情况,传播矢量
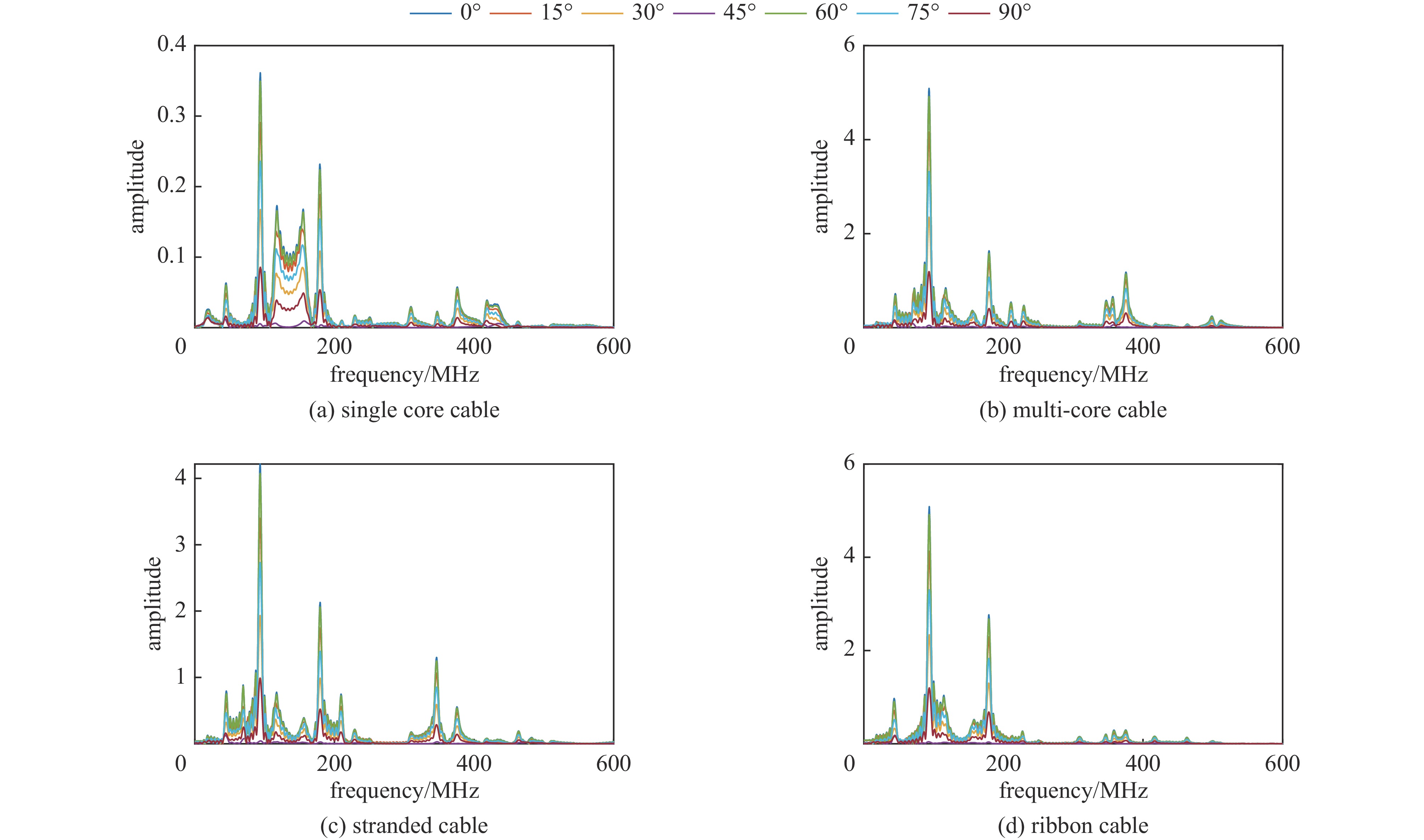
{\boldsymbol{k}} = (0,0, - 1) ,电场矢量{\boldsymbol{e}} = (1,0,0) ,干扰信号为高斯宽带信号,带宽为10−1 GHz,表达式为f(t) = {\exp[ - (t - 0.001\;6)^2}/4] ,时域单位为μs,幅度为1 V,仿真结果如图7所示。 图 7 线缆端口频域感应电压与线缆长度的关系Figure 7. Relationship between the frequency-domain induced voltage of a cable port and the length of the cable
图 7 线缆端口频域感应电压与线缆长度的关系Figure 7. Relationship between the frequency-domain induced voltage of a cable port and the length of the cable仿真结果表明,线缆耦合特性与线缆的长度密切相关,不同长度的线缆具有不同的频率谐振点:20 cm至100 cm长线缆谐振点分别为500 MHz、250 MHz、180 MHz、130 MHz、100 MHz,谐振频点的倒数与线缆长度满足相同的倍数关系,由于线缆长度过大,根据开路传输线的多谐性,在一个频段范围内可能出现多个谐振模式,导致多个谐振频点。
2.2 系统级线缆耦合仿真
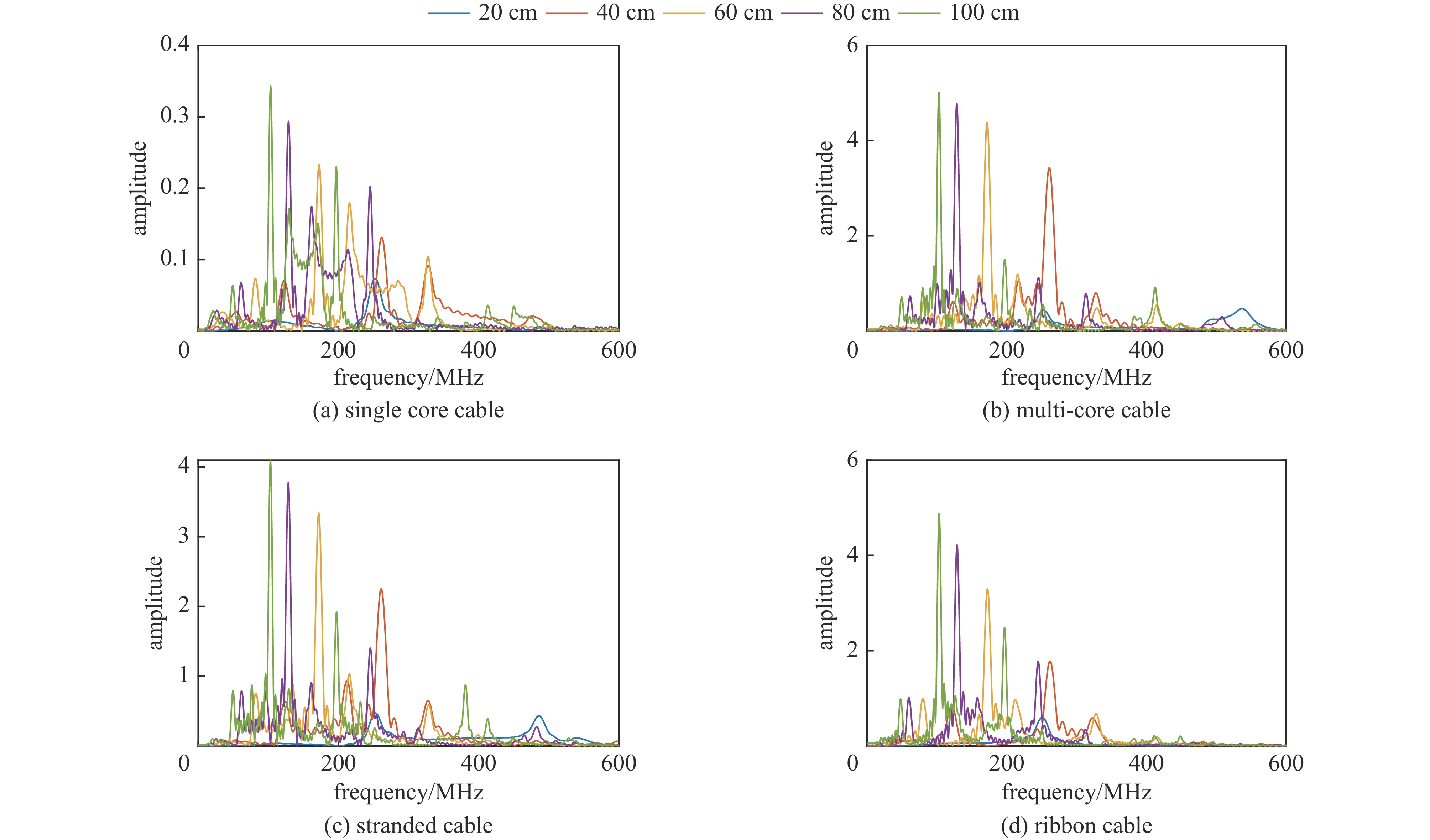
实际的无人机系统复杂的物理结构严重影响了无人机系统中的线缆耦合特征,通过建立四旋翼无人机模型对无人机系统级线缆耦合特征进一步进行研究[16],基于无人机系统实际的物理结构布置线缆,进而从宏观上分析系统线缆耦合薄弱环节。该模型基于主流开源无人机F450工程文件以最大程度还原实际工程情形,进一步删除不必要的物理结构以简化仿真的复杂度,并给定各结构对应材料参数。其中,线缆、顶部和底部结构电路板、电机设置为金属,其余部分设置为介质材料
\left( {\mu = 1,\varepsilon = 4.3} \right) 。F450无人机三维仿真模型如图8所示。考虑平面波侧入射的场景,传播矢量
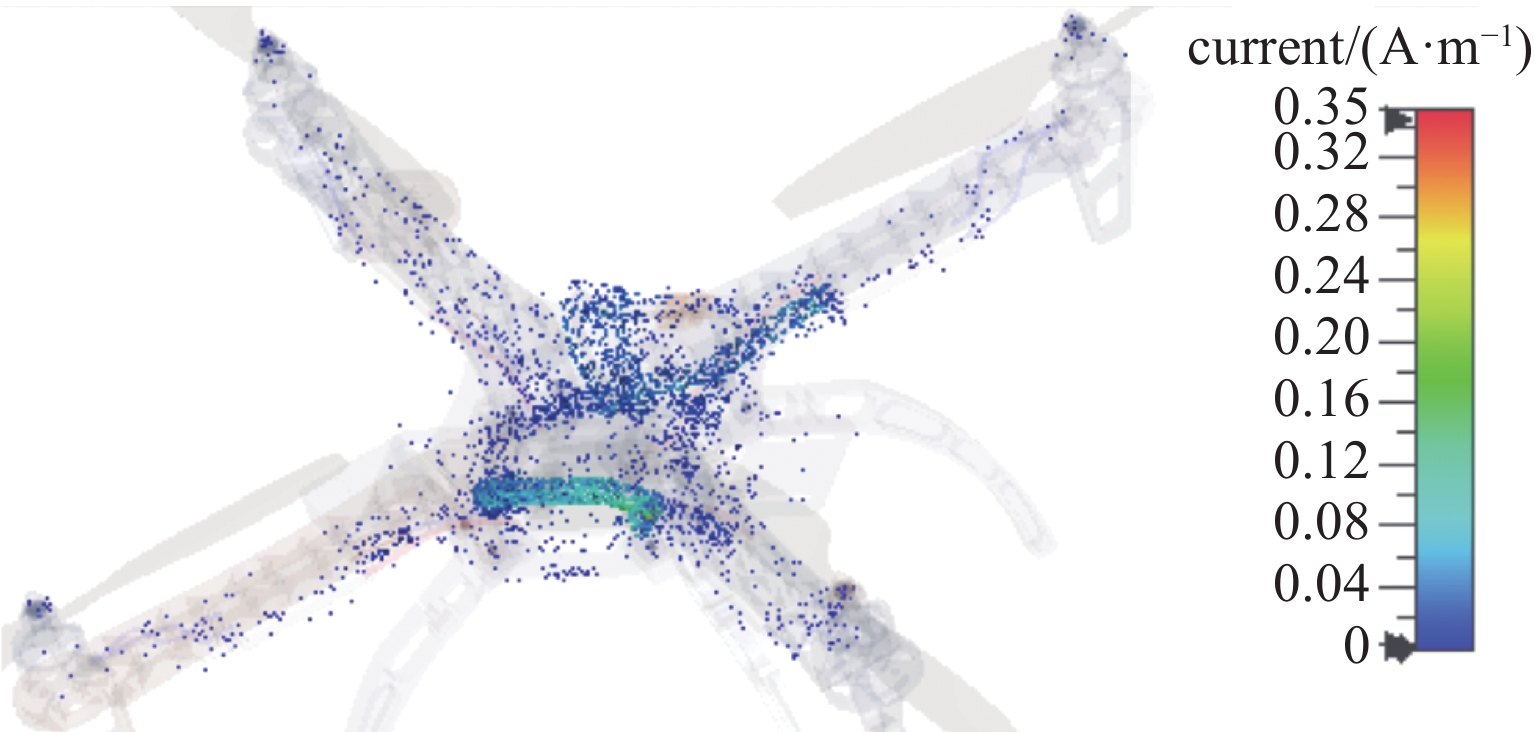
{\boldsymbol{k}} = ( - 1,0,0) ,电场矢量{\boldsymbol{e}} = (0,0,1) ,干扰信号为高斯宽带信号,信号表达式及参数设置与2.1小节一致,干扰信号带宽设置为10−1 GHz,仿真给出无人机系统表面电流分布情况如图9所示。仿真结果表明,金属线缆对电磁干扰具有强耦合性,表面电流集中分布在金属线缆表面;且在无人机飞控线缆端口处、旋翼线缆处电流集中。为确定无人机系统线缆耦合的薄弱环节,通过在飞控端口处、机翼线缆处、旋翼线缆处设置电压监测器,计算无人机各位置与底部结构电路板参考地之间的电压,进而得到无人机系统线缆耦合薄弱环节。电压监测器具体设置如图10所示。与所构建线缆电磁干扰场路联合仿真模型相比,实际的线缆布置需要与无人机共形,因此感应电压受电磁干扰信号传播方向、极化方向等诸多因素影响。因此,设置干扰信号为高斯信号,传播矢量为
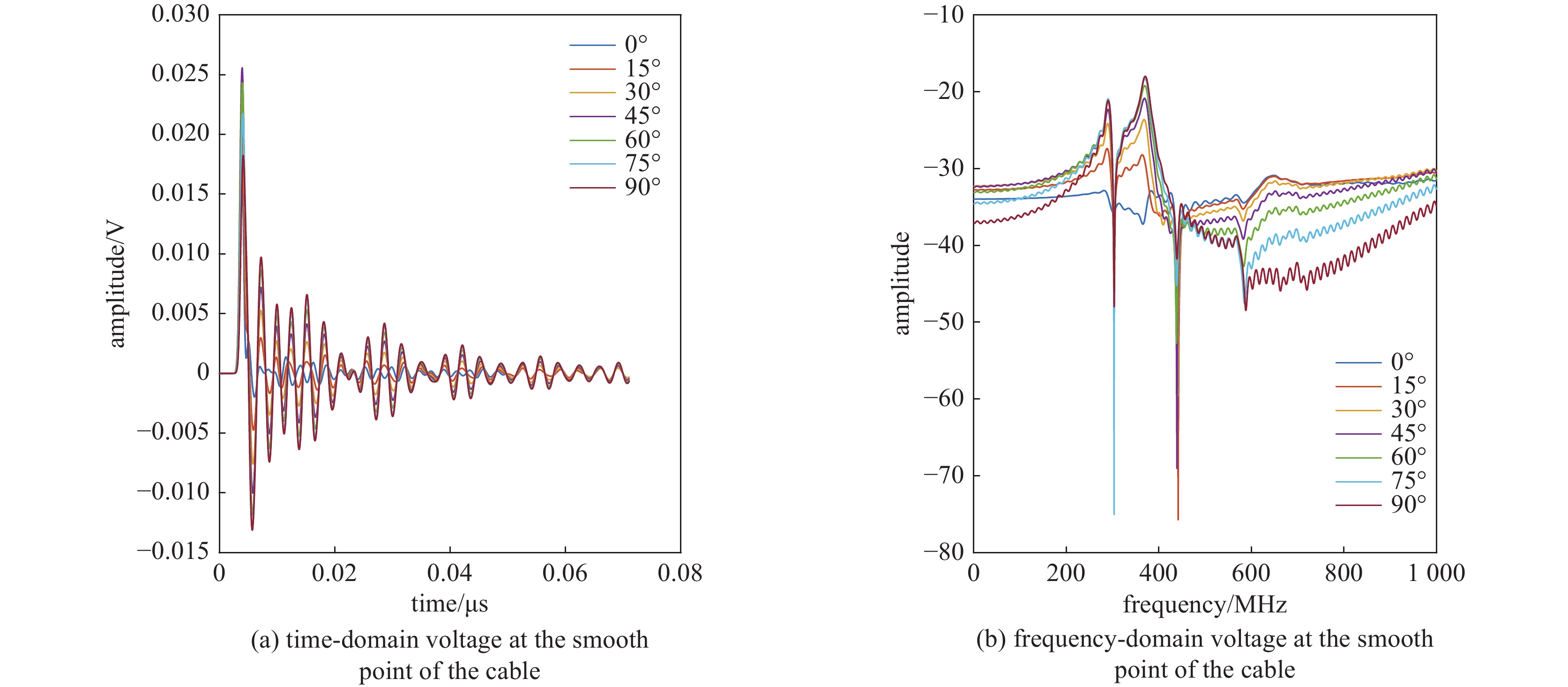
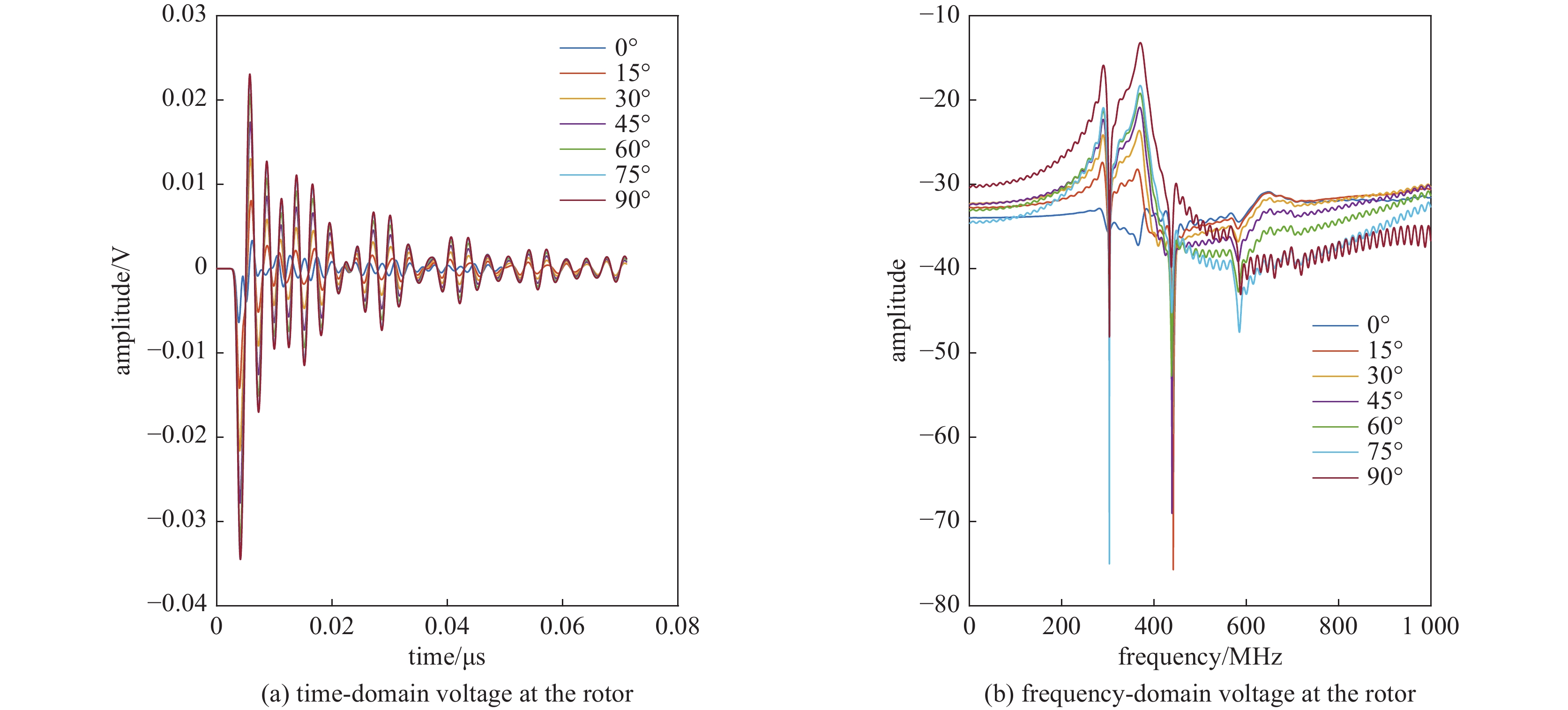
{\boldsymbol{k}} = (1,0,0) ,电场分量方向为{\boldsymbol{e}} = (0,\sin \theta ,\cos \theta ) ,同样选择电场矢量以参数角\theta 间隔15°进行参数扫描,进而研究无人机系统级线缆耦合特征分布,得到无人机系统线缆耦合薄弱环节。仿真结果如图11、图12、图13所示:当干扰信号方向与线缆所在平面平行时,无人机系统线缆耦合电压峰值最大,在无人机飞控线缆端口处,耦合电压峰值最大为0.052 V,耦合敏感频段为300~600 MHz;在无人机机翼线缆处,耦合电压峰值最大为0.025 V,耦合敏感频段为300~430 MHz;在无人机旋翼线缆处,耦合电压峰值为0.023 V,耦合敏感频段为300~430 MHz处,根据仿真结果可知无人机系统在飞控线缆端口处耦合电压较大。
3. 总 结
本文构建了线缆电磁干扰场路联合仿真模型,对无人机系统的多类型线缆进行了仿真分析,并基于主流开源无人机F450工程文件,建立了无人机系统级线缆仿真模型,根据无人机系统表面电流分布情况,在无人机系统飞控线缆端口处、机翼线缆处、旋翼线缆处设置了三个监测点,进一步研究了无人机系统内部不同位置处线缆耦合特征,得到了辐照干扰下无人机系统内部不同位置处线缆耦合敏感频段,通过将三个监测器的电压分布情况对比,得到了无人机系统线缆耦合的薄弱环节。仿真结果表明,激励信号的入射角度对于线缆的耦合特征有较大影响,当激励信号以不同角度入射相同长度的线缆时,线缆在电场矢量与线缆方向平行时耦合的峰值电压最大,且不同类型线缆耦合敏感频点相同,当激励信号以相同角度入射不同长度线缆时敏感频点的倒数与线缆长度满足相同的倍数关系;在无人机系统中,在单位幅度平面波电场矢量与线缆所在平面平行时耦合峰值电压最大,在无人机飞控线缆端口处,耦合电压峰值最大为0.052 V,耦合敏感频段为300~600 MHz;在无人机机翼线缆处,耦合电压峰值最大为0.025 V,耦合敏感频段为300~430 MHz;在无人机旋翼线缆处,耦合电压峰值为0.023 V,耦合敏感频段为300~430 MHz,根据仿真结果可知无人机系统线缆耦合薄弱环节在飞控线缆端口处。
-

图 1 双能加速器磁控管的工作状态图
Figure 1. Timing sequence of dual-energy accelerator of the magnetron

图 4 磁控管双能脉冲电压及电流波形
Figure 4. Dual-energy pulse voltage and current waveforms of the magnetron

图 5 磁控管单能脉冲电压电流波形
Figure 5. Single-energy pulse voltage and current waveforms of the magnetron

图 7 双能工作情况下的磁控管两端电压和电流仿真波形
Figure 7. Simulated dual-energy output pulse voltage and current waveforms of the magnetron

图 8 栅极电压信号与磁控管脉冲电流仿真
Figure 8. Simulated of gate voltage signal and magnetron pulse current
-
[1] 陈志强, 赵眺, 李亮. 高能双能X射线DR成像及物质识别技术综述[J]. CT理论与应用研究, 2014, 23(5):731-742Chen Zhiqiang, Zhao Tiao, Li Liang. The review of high energy dual-energy X-ray DR imaging and material recognition technology[J]. CT Theory and Applications, 2014, 23(5): 731-742 [2] 赵眺. 双能X射线集装箱CT重建及材料分解技术研究[D]. 北京: 清华大学, 2018: 2-8Zhao Tiao. Research on reconstruction and material decomposition techniques for dual energy X-ray container CT[D]. Beijing: Tsinghua University, 2018: 2-8 [3] 邬小平, 陈志强, 王学武. 双能X射线材料识别技术在大型集装箱检测系统中的应用[J]. 核电子学与探测技术, 2005, 25(6):782-784 doi: 10.3969/j.issn.0258-0934.2005.06.055Wu Xiaoping, Chen Zhiqiang, Wang Xuewu. Application of LCIS for material discrimination with dual energy method[J]. Nuclear Electronics & Detection Technology, 2005, 25(6): 782-784 doi: 10.3969/j.issn.0258-0934.2005.06.055 [4] 吴志芳, 董涛. 大型客体辐射成像检测技术的发展与趋势[J]. 原子能科学技术, 2019, 53(10):2062-2071 doi: 10.7538/yzk.2019.53.10.2062Wu Zhifang, Dong Tao. Development and trend of radiation imaging technology for large object[J]. Atomic Energy Science and Technology, 2019, 53(10): 2062-2071 doi: 10.7538/yzk.2019.53.10.2062 [5] 魏智. 发射机高压脉冲调制器的设计与实践[M]. 北京: 电子工业出版社, 2009Wei Zhi. Design and practice of transmitter high voltage pulse modulator[M]. Beijing: Publishing House of Electronics Industry, 2009 [6] 蔡政平, 曹湘军, 王勇. 大功率固态调制器的仿真研究[J]. 强激光与粒子束, 2007, 19(2):330-334Cai Zhengping, Cao Xiangjun, Wang Yong. Simulation study on high power solid-state modulator[J]. High Power Laser and Particle Beams, 2007, 19(2): 330-334 [7] 尚雷, 李为民, 丛晓艳, 等. 大功率固态脉冲调制器技术分析[J]. 高电压技术, 2005, 31(11):28-30 doi: 10.3969/j.issn.1003-6520.2005.11.011Shang Lei, Li Weimin, Cong Xiaoyan, et al. Study on the technology of high power, solid-state modulators[J]. High Voltage Engineering, 2005, 31(11): 28-30 doi: 10.3969/j.issn.1003-6520.2005.11.011 [8] Gaudreau M P J, Casey J, Mulvaney J M, et al. Solid state modulator for klystron/gyrotron conditioning, testing, and operation[C]//Conference Record of 2000 Twenty-Fourth International Power Modulator Symposium. 2000: 125-128. [9] 刘克富. 固态Marx发生器研究进展[J]. 高电压技术, 2015, 41(6):1781-1787Liu Kefu. Research progress in solid-state Marx generators[J]. High Voltage Engineering, 2015, 41(6): 1781-1787 [10] 饶俊峰. 基于固态开关的重复频率脉冲功率源的脉冲调制技术及其应用[D]. 上海: 复旦大学, 2013Rao Junfeng. Pulse modulation technology of repetitive frequency pulse power source based on solid state switch and its application[D]. Shanghai: Fudan University, 2013 [11] 黄军, 戴广明, 田为. 几种全固态刚管调制器的对比[J]. 现代雷达, 2010, 32(3):80-83 doi: 10.3969/j.issn.1004-7859.2010.03.020Huang Jun, Dai Guangming, Tian Wei. Comparision of several all-solid-state hard tube modulators[J]. Modern Radar, 2010, 32(3): 80-83 doi: 10.3969/j.issn.1004-7859.2010.03.020 [12] 饶俊峰, 李成建, 李孜, 等. 全固态高重频高压脉冲电源[J]. 强激光与粒子束, 2019, 31:035001 doi: 10.11884/HPLPB201931.190005Rao Junfeng, Li Chengjian, Li Zi, et al. All solid state high-frequency and high voltage pulsed power supply[J]. High Power Laser and Particle Beams, 2019, 31: 035001 doi: 10.11884/HPLPB201931.190005 [13] Zarghani M, Mohsenzade S, Kaboli S. A high-voltage pulsed power supply with online rise time adjusting capability for vacuum tubes[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(3): 3019-3029. doi: 10.1109/JESTPE.2020.3006013 [14] 姜松, 邱力文, 饶俊峰, 等. 新型全固态高压多电平波形发生器的研制[J]. 强激光与粒子束, 2019, 31:115003 doi: 10.11884/HPLPB201931.190124Jiang Song, Qiu Liwen, Rao Junfeng, et al. Development of a new all-solid-state high voltage multilevel waveform generator[J]. High Power Laser and Particle Beams, 2019, 31: 115003 doi: 10.11884/HPLPB201931.190124 [15] 冯文荃. 磁控管V-I特性的近似分析及其应用[J]. 南京大学学报, 1990, 26(4):596-602Feng Wenquan. The approximate analysis of magnetron V-I characteristics and its applications[J]. Journal of Nanjing University Natural Science, 1990, 26(4): 596-602 -



 下载:
下载:





























 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 230
- HTML全文浏览量: 52
- PDF下载量: 31
- 被引次数: 0
