

Cascadable synchronous drive circuit for voltage controlled thyristor
-
摘要: 针对压控晶闸管脉冲工作特性和串联使用需求,设计了一种可级联的驱动电路,实现了多级串联压控晶闸管的同步开通。首先,介绍了电路拓扑及工作原理,利用推挽结构的平面耦合电感器隔离初、次级信号并传递驱动能量,解决了串联驱动小型化和低压供电条件下快前沿输出的问题;其次,通过计算和仿真确定了电路参数和主要器件选型;最后,使用6级串联的MCT作为放电开关搭建了测试电路,在充电电压8.4 kV、工作重复频率20 Hz条件下,4 Ω电阻负载上获得了幅值为1.958 kA的准方波脉冲电流。Abstract: Aiming at the pulse operating characteristics of voltage-controlled thyristors, a cascadable driving circuit is designed to realize the synchronous opening of multi-stage series-connected voltage-controlled thyristors. Firstly, the circuit topology and working principle is analysed. in which the coupled inductor is used to isolate the driver signal and transfer power to open the switch. Based on Blumlein PFN, an experimental test circuit is built, in which a 6-stage MOS-controlled thyristor is series connected to be the discharge switch. A quasi-square-wave pulse current with an amplitude of 1.958 kA is obtained on a 4 Ω resistor.
-
Key words:
- driver circuit /
- MOS-controlled thyristor /
- series connection /
- synchronization /
- quasi-square pulse
-
随着执行任务复杂程度的提高以及电磁环境的日益复杂,无人机的可靠性、稳定性和安全性都受到了影响。电磁干扰信号通过前门耦合与后门耦合的方式进入无人机系统内部[1],极大影响了无人机的工作性能。线缆耦合作为电磁信号进入无人机系统内部的主要方式之一[2],其在无人机系统中耦合特征的研究对于无人机电磁效应分析具有重要意义。
近年来,针对线缆耦合特征研究,许多学者在理论与实验方面开展了相关研究。董昱青等人[3]针对窄带高功率微波辐照下线缆面临干扰的问题,仿真研究了NHPM辐照下裸露线缆的耦合响应特征,研究了不同中心频率、不同脉冲宽度的4种NHPM对不同长度裸露线缆耦合特征的影响;杨茂松等人[4]讨论了典型互联系统辐射与注入的等效以及在高场强下的外推条件,并对所选非线性器件是否满足实验要求进行了实验验证;孙江宁等人[5]从非屏蔽多芯线缆单一线对大电流注入等效替代辐照模型出发,提出了单一线对的大电流注入等效辐照的试验方法,以非屏蔽四芯线为试验对象,探索了非屏蔽多芯线缆终端响应规律;季涛等人[6]基于传输线理论,建立了线缆束网络电磁耦合的拓扑模型,得出了计算复杂线缆束网络系统终端耦合电压与电流的计算方法;刘峻林等人[7]开展了高空核电磁脉冲与双层损耗土壤下线缆的耦合响应研究。在无人机电磁效应分析中,无人机复杂的物理结构严重影响了线缆耦合特征[8]。目前针对电子系统中的线缆耦合,主要开展了脉冲、连续波干扰信号对电子系统的线缆耦合数值研究[9-10],王晓明[11]针对机载综合射频系统开展了高空核电磁脉冲耦合分析与验证研究,仿真并测试了干扰对射频系统金属外壳的孔缝、互联线缆的耦合,给出了仿真与实验的对比结果,余道杰[12]等人针对无人机定位系统分析了不同耦合路径下辐照干扰耦合机理和作用机制。上述研究主要对单类型线缆在典型场景下进行的仿真分析,并未结合实际无人机系统具体物理结构以及系统中的实际布线方式对无人机系统级线缆开展耦合特征分析。
针对上述问题,本文构建了线缆电磁干扰场路联合仿真模型,分析了无人机系统中各类型线缆基本耦合特征,得到了线缆长度与敏感频点的关联关系,并进一步结合无人机复杂物理结构建立了无人机系统级线缆耦合模型,分析了基于无人机系统复杂物理结构布线方式下线缆的耦合特征,得到了辐照干扰下无人机系统线缆耦合薄弱环节。
1. 无人机系统场-线耦合模型建立
无人机飞控与外接组件主要通过线缆连接,在强电磁辐射干扰作用下,线缆会激励出感应电压和感应电流,从而引起敏感模块的故障。无人机系统普遍使用的线缆结构主要包含单芯线缆、多芯线缆、绞合线缆、带状线缆,由于线缆耦合的过程与天线类似,因此需要考虑线缆尺寸与电磁干扰信号波长之间的关系,当线缆长度与电磁波波长相比拟时,线缆耦合强度较大。旋翼无人机尺寸较小,线缆长度通常在几十厘米,因此仿真过程主要考虑尺寸在0.1~1 m长度的线缆。
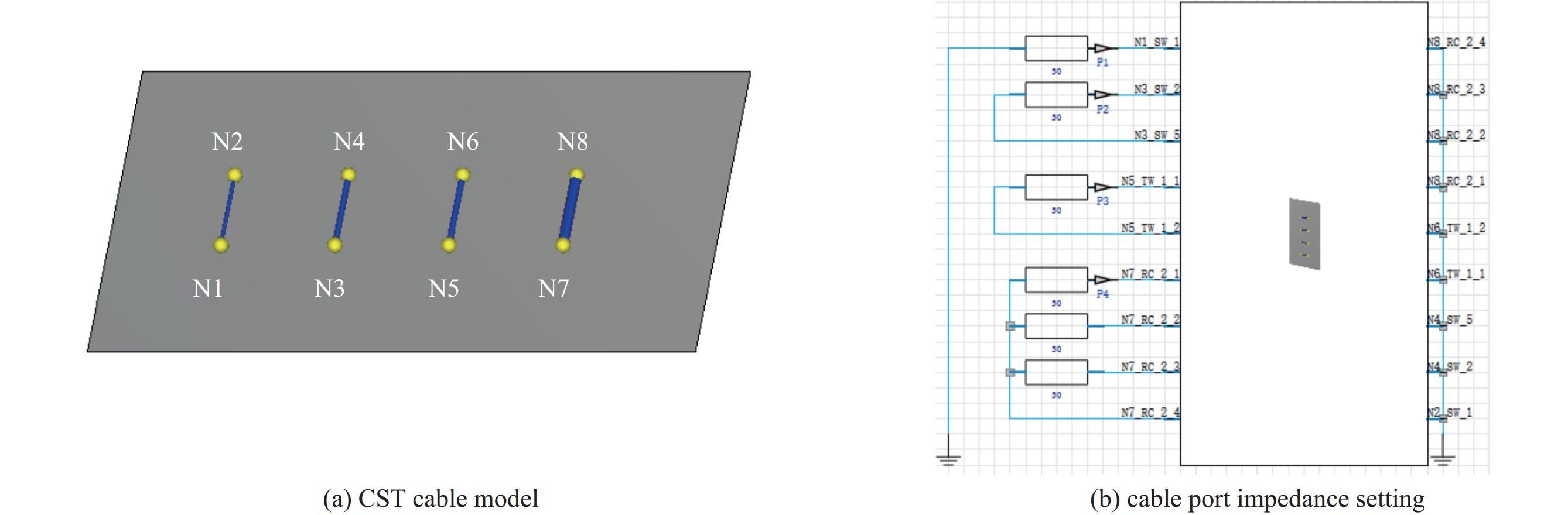
在CST电缆工作室中建立如图1所示线缆连接模型,在金属地平面上按1 m等间隔安置四种类型的线缆,分别为单芯线缆、双芯线缆、绞合线缆、带状线缆。线缆的空间布置以及端接的阻抗如图2所示,其中N1-N2为单芯线缆,N3-N4为双芯线缆,N5-N6为绞合线缆,N7-N8为带状线缆。单芯线缆的连接方式描述了不同区域的地通过线缆连接,其余三种线缆都以线束中一根线缆作为参考地,其余线缆传输信号的方式连接,所有的端接阻抗设置为
50Ω [13]。 图 2 线缆电磁干扰场路联合仿真模型Figure 2. Co-simulation model of electromagnetic interference field of cable
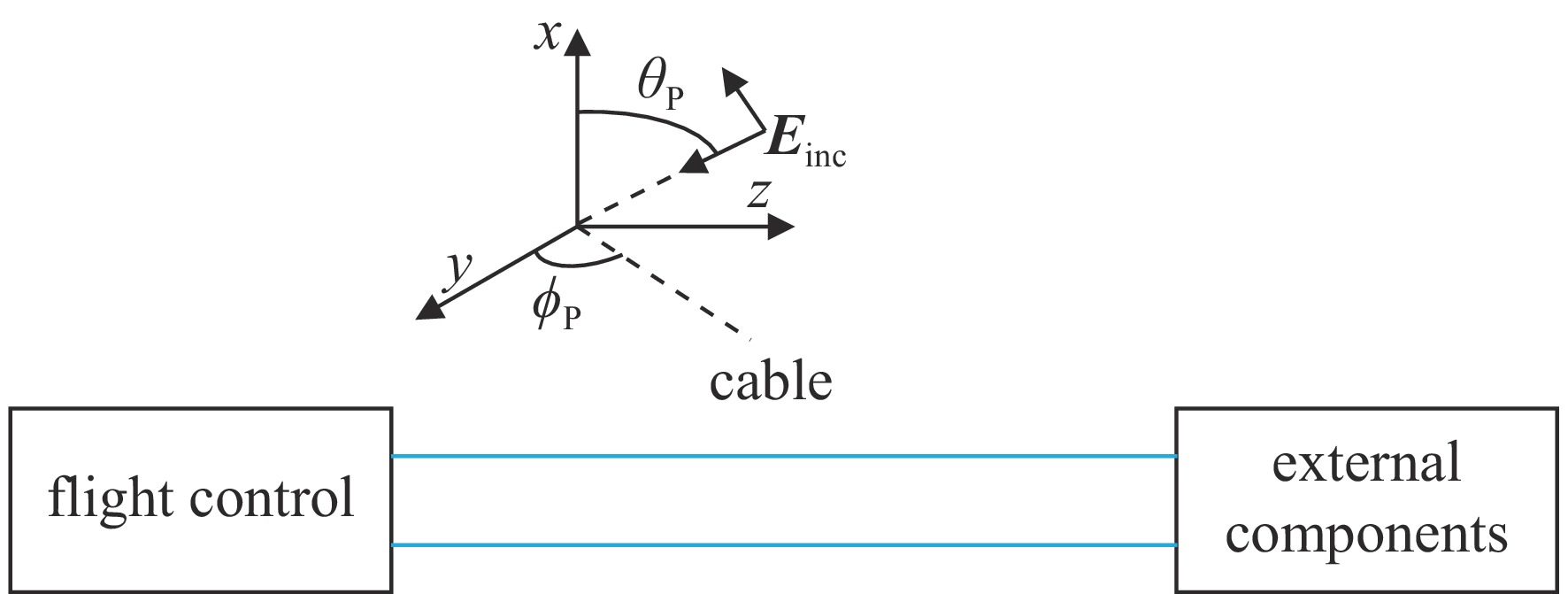
图 2 线缆电磁干扰场路联合仿真模型Figure 2. Co-simulation model of electromagnetic interference field of cable在无人机系统中,线缆场-路耦合模型可等效为一般电路模型,通过传输线方程[14-15]可求解在任意角度平面波激励下线缆场-路耦合瞬态响应,图3为无人机系统场-路耦合模型,图4为无人机系统场-路耦合等效电路模型。
 图 4 无人机系统场-路耦合等效电路模型Figure 4. Field-line coupling equivalent circuit model of an unmanned aerial vehicle system
图 4 无人机系统场-路耦合等效电路模型Figure 4. Field-line coupling equivalent circuit model of an unmanned aerial vehicle system由于辐照场的作用,在无人机场-路耦合模型中引入两个辐射源,得到等效电路模型如图4所示。
任意角度入射电磁场可表示为
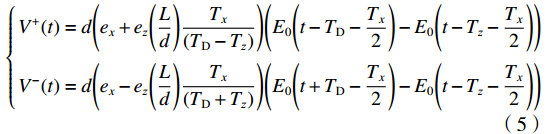
{ {\boldsymbol{E}}_{{\mathrm{inc}}}}(x,y,{\textit{z}},t) = [{e_x}{ {\boldsymbol{a}}_x} + {e_y}{ {\boldsymbol{a}}_y} + {e_{\textit{z}}}{ {\boldsymbol{a}}_{\textit{z}}}]{E_0}\Bigg(t - \dfrac{x}{{{v_x}}} - \dfrac{y}{{{v_y}}} - \dfrac{{\textit{z}}}{{{v_{\textit{z}}}}}\Bigg) (1) {v_x} = \dfrac{\omega }{{{\beta _x}}} = - \dfrac{v}{{\cos {\theta _{\mathrm{p}}}}} (2) {v_y} = \dfrac{\omega }{{{\beta _y}}} = - \dfrac{v}{{\sin {\theta _{\mathrm{p}}}\cos {\phi _{\mathrm{p}}}}} (3) {v_{\textit{z}}} = \dfrac{\omega }{{{\beta _{\textit{z}}}}} = - \dfrac{v}{{\sin {\theta _{\mathrm{p}}}\sin {\phi _{\mathrm{p}}}}} (4) 根据传输线方程,可推导得到入射场激励信号表达式为
\left\{ \begin{gathered} {V^ + }(t) = d\Bigg({e_x} + {e_{\textit{z}}}\Bigg(\dfrac{L}{d}\Bigg)\dfrac{{{T_x}}}{{({T_{\mathrm{D}}} - {T_{\textit{z}}})}}\Bigg)\Bigg({E_0}\Bigg(t - {T_{\mathrm{D}}} - \dfrac{{{T_x}}}{2}\Bigg) - {E_0}\Bigg(t - {T_{\textit{z}}} - \dfrac{{{T_x}}}{2}\Bigg)\Bigg) \\ {V^ - }(t) = d\Bigg({e_x} - {e_{\textit{z}}}\Bigg(\dfrac{L}{d}\Bigg)\dfrac{{{T_x}}}{{({T_{\mathrm{D}}} + {T_{\textit{z}}})}}\Bigg)\Bigg({E_0}\Bigg(t + {T_{\mathrm{D}}} - \dfrac{{{T_x}}}{2}\Bigg) - {E_0}\Bigg(t - {T_{\textit{z}}} - \dfrac{{{T_x}}}{2}\Bigg)\Bigg) \\ \end{gathered} \right. (5) 无人机系统线缆终端响应表达式为
\left\{ \begin{gathered} V(0,t) = \dfrac{{{R_{\mathrm{S}}}}}{{{R_{\mathrm{S}}} + {Z_{\mathrm{C}}}}}\Bigg({{\mathit{\Gamma}} _{\mathrm{L}}}\displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ + }(t - (2i + 1){T_{\mathrm{D}}})} - \displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ - }(t - (2i + 1){T_{\mathrm{D}}})} \Bigg) \\ V(L,t) = \dfrac{{{R_{\mathrm{L}}}}}{{{R_{\mathrm{L}}} + {Z_{\mathrm{C}}}}}\Bigg(\displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ + }(t - (2i){T_{\mathrm{D}}})} - {{\mathit{\Gamma }}_{\mathrm{S}}}\displaystyle\sum\limits_{i = 0}^\infty {{\alpha ^i}{V^ - }(t - (2i){T_{\mathrm{D}}})} \Bigg) \\ \end{gathered} \right. (6) 式中:
{T_{{{\mathrm{D}}}}} = \dfrac{L}{v} ,{R_{\rm{S}}} 为始端阻抗,{R_{\rm{L}}} 为终端阻抗,{Z_{\rm{C}}} 为电路容性阻抗,\alpha = {{\mathit{\Gamma}} _{\rm{S}}}{{\mathit{\Gamma}} _{\rm{L}}} ,L为无人机线缆长度,{T_{{x}}} = \dfrac{L}{{{v_{{x}}}}} ,{T_{\textit{z}}} = \dfrac{L}{{{v_{\textit{z}}}}} ,{{\mathit{\Gamma}} _{\rm{S}}} = \dfrac{{{R_{\rm{S}}} - {Z_{\rm{C}}}}}{{{R_{\rm{S}}} + {Z_{\rm{C}}}}} ,{{\mathit{\Gamma}} _{\rm{L}}} = \dfrac{{{R_{\rm{L}}} - {Z_{\rm{C}}}}}{{{R_{\rm{L}}} + {Z_{\rm{C}}}}} ,公式(5)与公式(6)联立求得无人机系统场-路耦合终端响应。2. 无人机系统线缆电磁效应仿真分析
2.1 无人机线缆耦合仿真分析
在无人机多类型线缆场路联合仿真分析中,设置线缆为单芯线缆,线芯为直径0.5 mm的金属铜,外部由PVC绝缘层包裹,线缆的截面直径为1 mm,双芯线缆为两根单芯线缆并排放置,绞合线缆为两根单芯线缆按照20 mm旋转一圈设置,带状线为8根单芯线缆并排放置,线缆间隔为2.3 mm。
考虑实际情况下电磁干扰信号入射角度的随机性,仿真平面波入射场景,线缆长度为1 m,干扰信号为高斯宽带信号,传播矢量
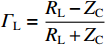
{\boldsymbol{k}} = (0,0, - 1) ,电场分量方向为{\boldsymbol{e}} = (\cos \theta ,\sin \theta ,0) ,参数角\theta 间隔15°进行参数扫描,表达式为f(t) = {\exp[ - (t - 0.001\;6)^2}/4] ,时域单位为μs,幅度为1 V,带宽为10−1 GHz,仿真结果如图5、图6所示。时域仿真结果表明,电场矢量与线缆所在平面平行时,耦合的峰值电压最大,其中单芯线缆直连的情况描述的是地到地的连接,因此感应电压较低,大小为0.016 V。其余三种情况均为常用的信号线的连接方式,如无人机外接导航定位模块采用的USART接口使用双绞线的N5-N6的连接方式。由于仿真的四种线缆均无屏蔽层,因此线缆端口处的感应电压较大,双芯线缆与双绞线缆感应电压峰值为0.14 V,带状线缆感应电压峰值为0.1 V。频域结果表明,不同类型长度相等的线缆谐振频点相同,1 m长线缆的谐振频点在100 MHz与200 MHz。 图 5 线缆端口时域感应电压与入射电磁波角度的关系Figure 5. Relationship between the time-domain induced voltage of a cable port and the angle of the incident electromagnetic wave
图 5 线缆端口时域感应电压与入射电磁波角度的关系Figure 5. Relationship between the time-domain induced voltage of a cable port and the angle of the incident electromagnetic wave 图 6 线缆端口频域感应电压与入射电磁波角度的关系Figure 6. Relationship between the frequency-domain induced voltage of the cable port and the angle of the incident electromagnetic wave
图 6 线缆端口频域感应电压与入射电磁波角度的关系Figure 6. Relationship between the frequency-domain induced voltage of the cable port and the angle of the incident electromagnetic wave根据传输线理论可知,线缆谐振频点与线缆长度有关。结合上述频域仿真结果,进一步研究耦合特征与线缆长度的关系:以20 cm为间隔,仿真分析长度20~100 cm的线缆耦合特征。考虑平面波正入射情况,传播矢量
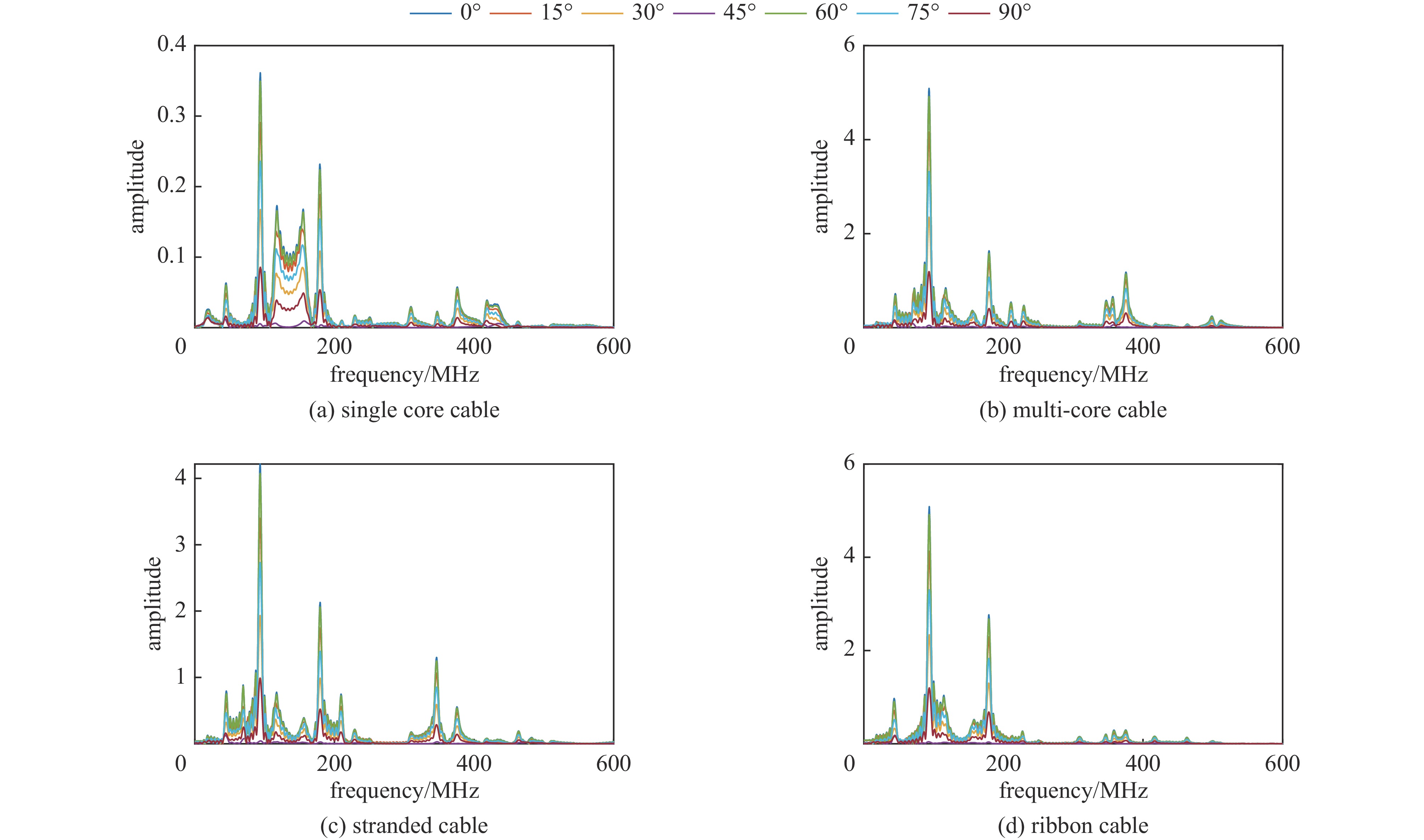
{\boldsymbol{k}} = (0,0, - 1) ,电场矢量{\boldsymbol{e}} = (1,0,0) ,干扰信号为高斯宽带信号,带宽为10−1 GHz,表达式为f(t) = {\exp[ - (t - 0.001\;6)^2}/4] ,时域单位为μs,幅度为1 V,仿真结果如图7所示。 图 7 线缆端口频域感应电压与线缆长度的关系Figure 7. Relationship between the frequency-domain induced voltage of a cable port and the length of the cable
图 7 线缆端口频域感应电压与线缆长度的关系Figure 7. Relationship between the frequency-domain induced voltage of a cable port and the length of the cable仿真结果表明,线缆耦合特性与线缆的长度密切相关,不同长度的线缆具有不同的频率谐振点:20 cm至100 cm长线缆谐振点分别为500 MHz、250 MHz、180 MHz、130 MHz、100 MHz,谐振频点的倒数与线缆长度满足相同的倍数关系,由于线缆长度过大,根据开路传输线的多谐性,在一个频段范围内可能出现多个谐振模式,导致多个谐振频点。
2.2 系统级线缆耦合仿真
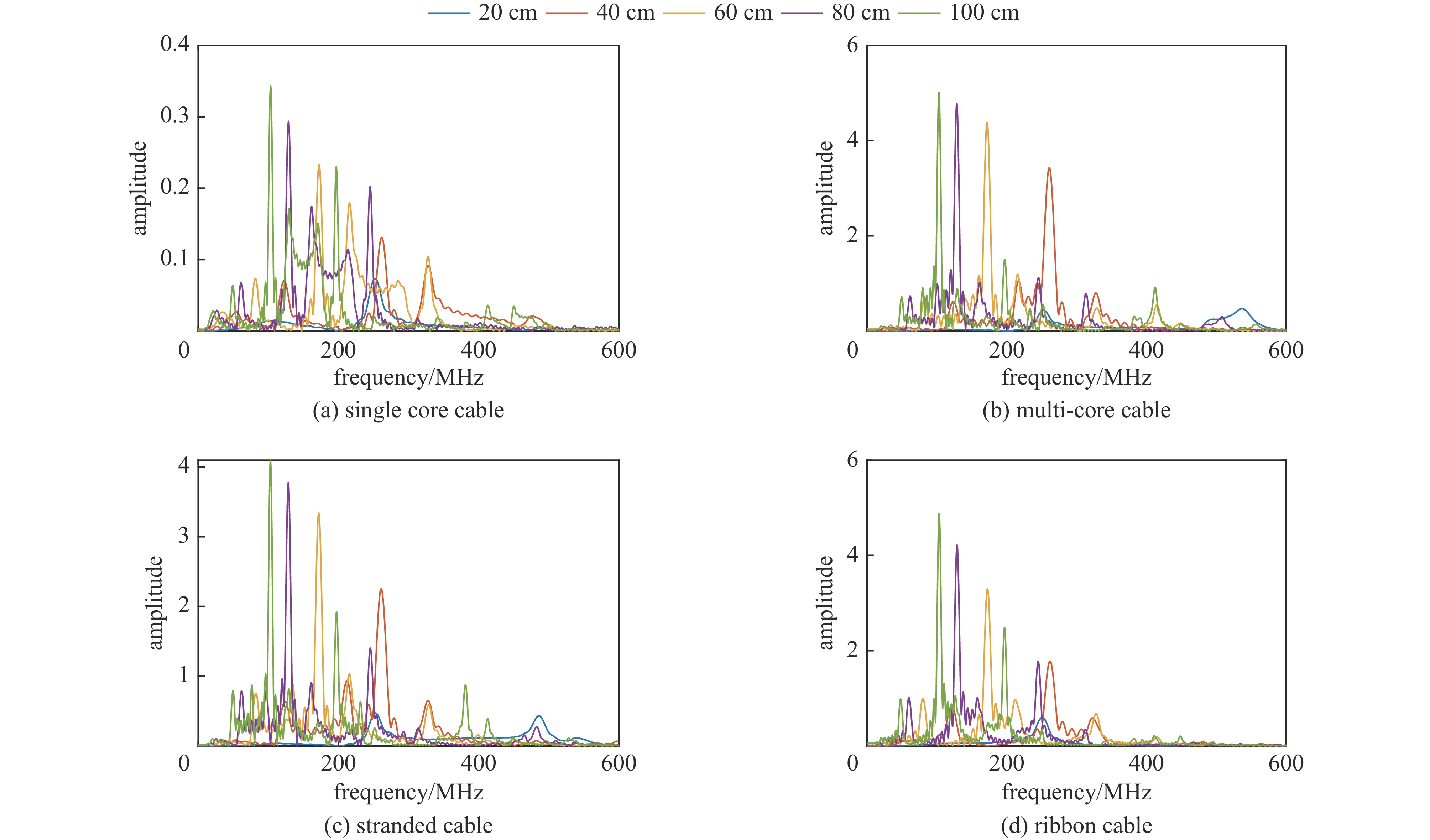
实际的无人机系统复杂的物理结构严重影响了无人机系统中的线缆耦合特征,通过建立四旋翼无人机模型对无人机系统级线缆耦合特征进一步进行研究[16],基于无人机系统实际的物理结构布置线缆,进而从宏观上分析系统线缆耦合薄弱环节。该模型基于主流开源无人机F450工程文件以最大程度还原实际工程情形,进一步删除不必要的物理结构以简化仿真的复杂度,并给定各结构对应材料参数。其中,线缆、顶部和底部结构电路板、电机设置为金属,其余部分设置为介质材料
\left( {\mu = 1,\varepsilon = 4.3} \right) 。F450无人机三维仿真模型如图8所示。考虑平面波侧入射的场景,传播矢量
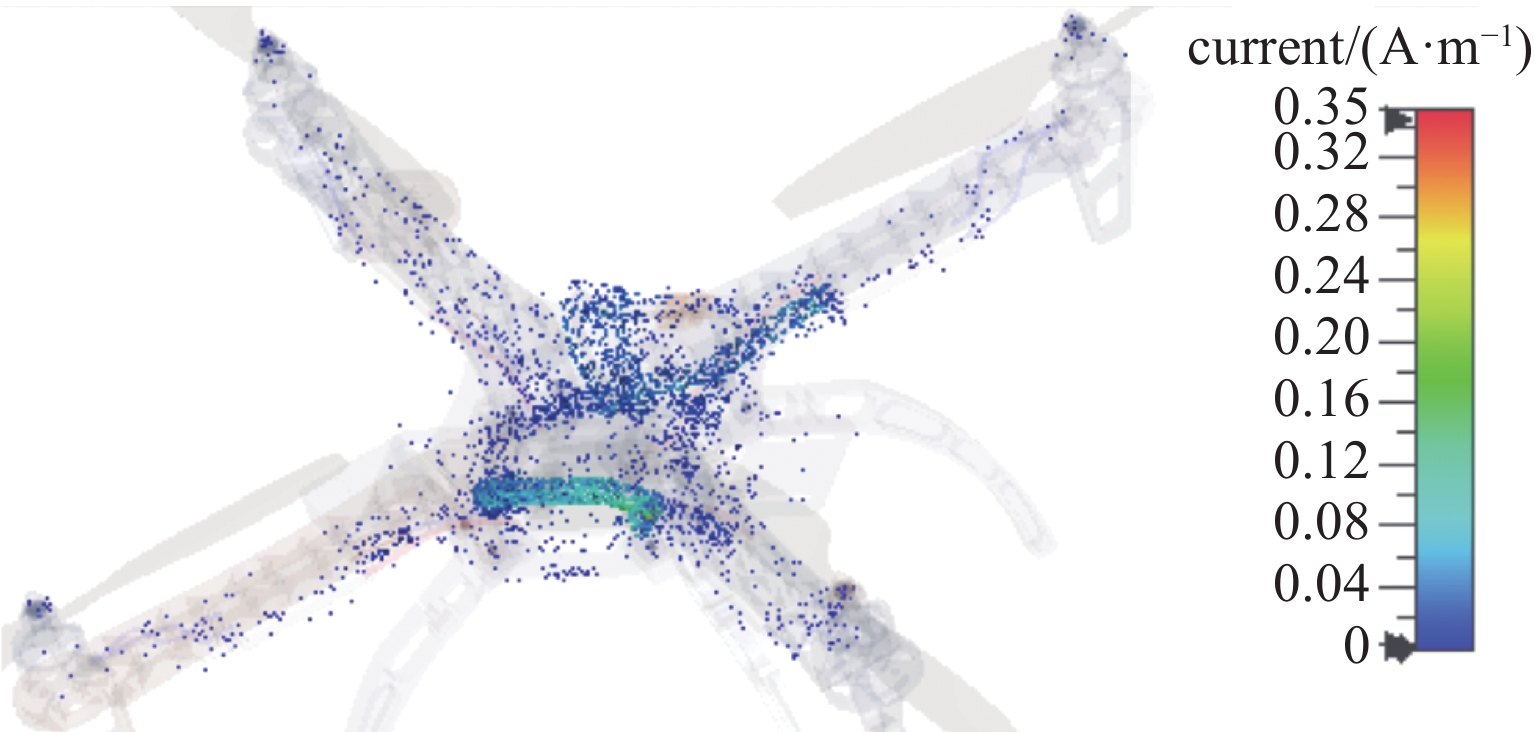
{\boldsymbol{k}} = ( - 1,0,0) ,电场矢量{\boldsymbol{e}} = (0,0,1) ,干扰信号为高斯宽带信号,信号表达式及参数设置与2.1小节一致,干扰信号带宽设置为10−1 GHz,仿真给出无人机系统表面电流分布情况如图9所示。仿真结果表明,金属线缆对电磁干扰具有强耦合性,表面电流集中分布在金属线缆表面;且在无人机飞控线缆端口处、旋翼线缆处电流集中。为确定无人机系统线缆耦合的薄弱环节,通过在飞控端口处、机翼线缆处、旋翼线缆处设置电压监测器,计算无人机各位置与底部结构电路板参考地之间的电压,进而得到无人机系统线缆耦合薄弱环节。电压监测器具体设置如图10所示。与所构建线缆电磁干扰场路联合仿真模型相比,实际的线缆布置需要与无人机共形,因此感应电压受电磁干扰信号传播方向、极化方向等诸多因素影响。因此,设置干扰信号为高斯信号,传播矢量为
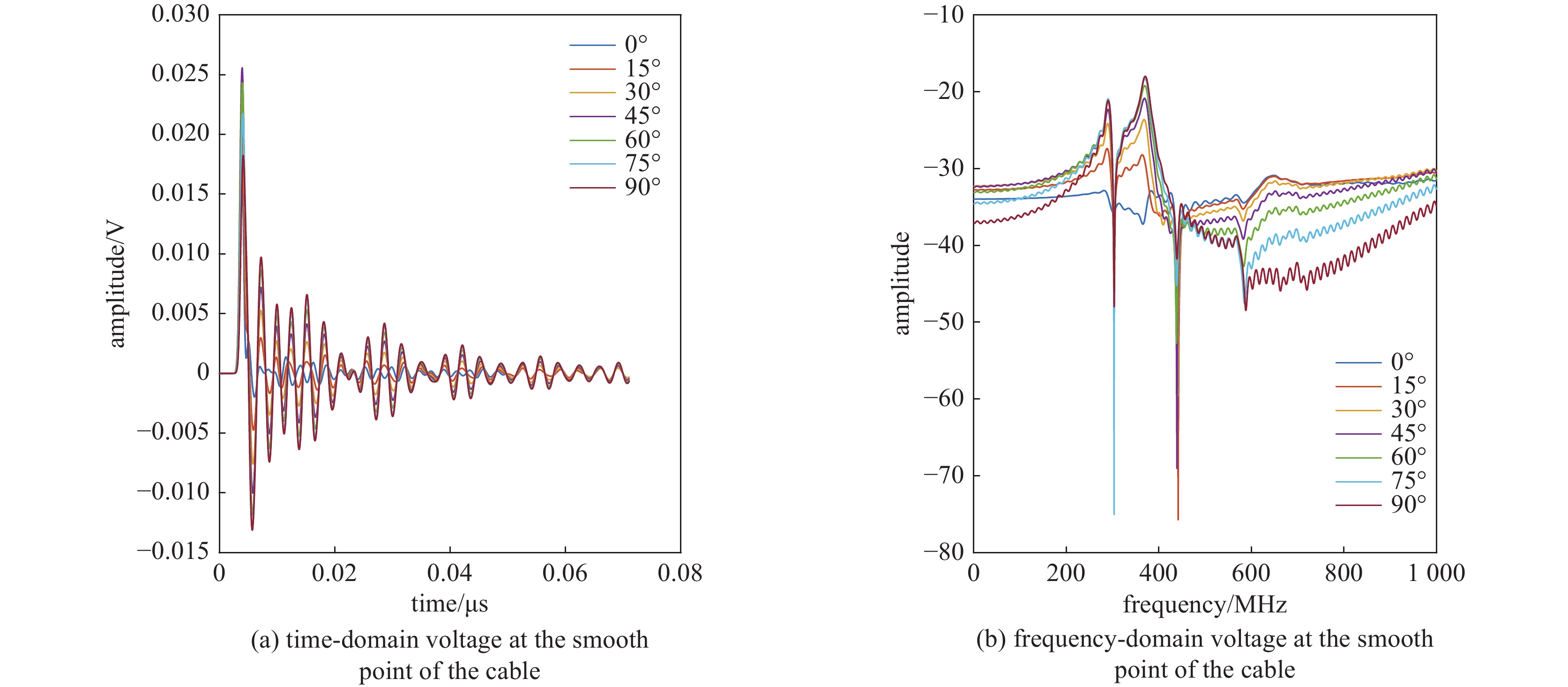
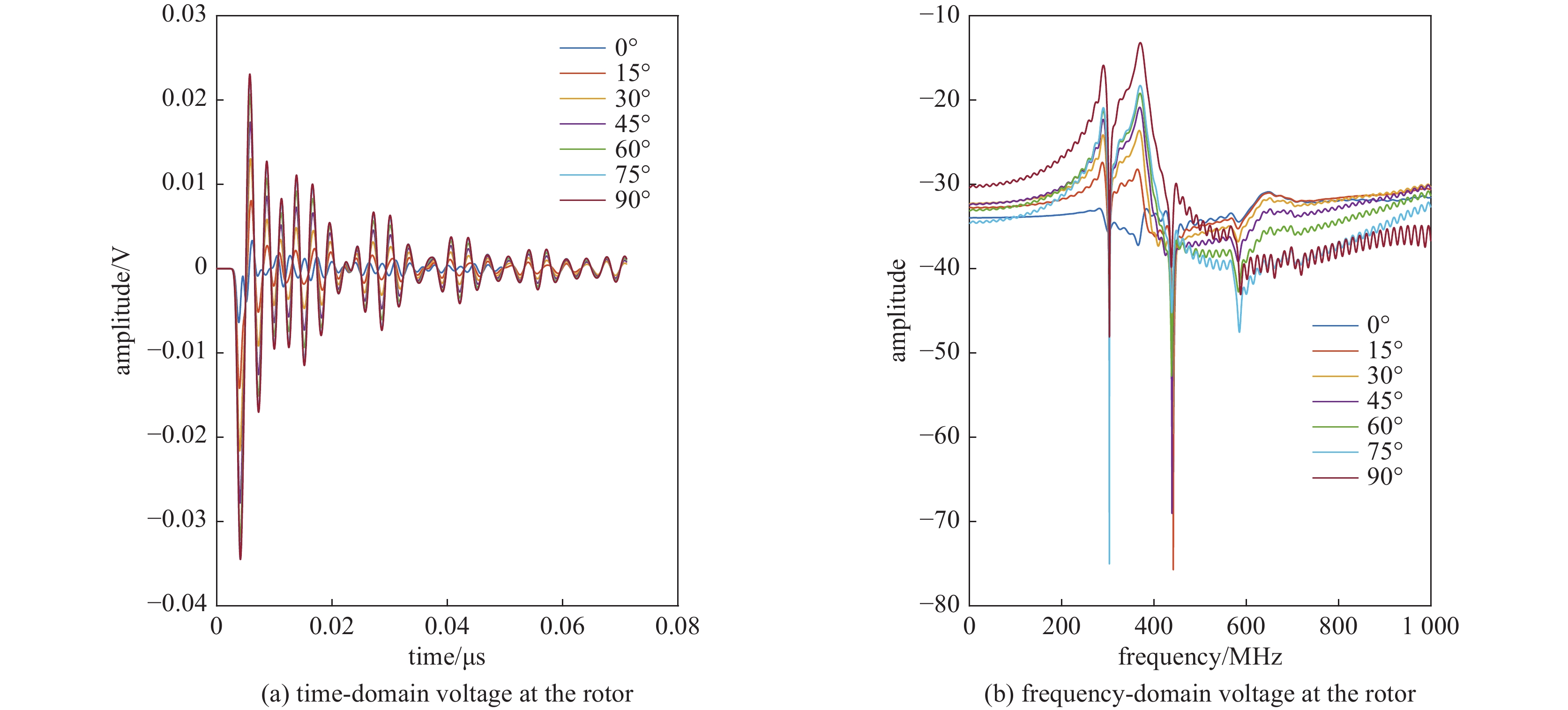
{\boldsymbol{k}} = (1,0,0) ,电场分量方向为{\boldsymbol{e}} = (0,\sin \theta ,\cos \theta ) ,同样选择电场矢量以参数角\theta 间隔15°进行参数扫描,进而研究无人机系统级线缆耦合特征分布,得到无人机系统线缆耦合薄弱环节。仿真结果如图11、图12、图13所示:当干扰信号方向与线缆所在平面平行时,无人机系统线缆耦合电压峰值最大,在无人机飞控线缆端口处,耦合电压峰值最大为0.052 V,耦合敏感频段为300~600 MHz;在无人机机翼线缆处,耦合电压峰值最大为0.025 V,耦合敏感频段为300~430 MHz;在无人机旋翼线缆处,耦合电压峰值为0.023 V,耦合敏感频段为300~430 MHz处,根据仿真结果可知无人机系统在飞控线缆端口处耦合电压较大。
3. 总 结
本文构建了线缆电磁干扰场路联合仿真模型,对无人机系统的多类型线缆进行了仿真分析,并基于主流开源无人机F450工程文件,建立了无人机系统级线缆仿真模型,根据无人机系统表面电流分布情况,在无人机系统飞控线缆端口处、机翼线缆处、旋翼线缆处设置了三个监测点,进一步研究了无人机系统内部不同位置处线缆耦合特征,得到了辐照干扰下无人机系统内部不同位置处线缆耦合敏感频段,通过将三个监测器的电压分布情况对比,得到了无人机系统线缆耦合的薄弱环节。仿真结果表明,激励信号的入射角度对于线缆的耦合特征有较大影响,当激励信号以不同角度入射相同长度的线缆时,线缆在电场矢量与线缆方向平行时耦合的峰值电压最大,且不同类型线缆耦合敏感频点相同,当激励信号以相同角度入射不同长度线缆时敏感频点的倒数与线缆长度满足相同的倍数关系;在无人机系统中,在单位幅度平面波电场矢量与线缆所在平面平行时耦合峰值电压最大,在无人机飞控线缆端口处,耦合电压峰值最大为0.052 V,耦合敏感频段为300~600 MHz;在无人机机翼线缆处,耦合电压峰值最大为0.025 V,耦合敏感频段为300~430 MHz;在无人机旋翼线缆处,耦合电压峰值为0.023 V,耦合敏感频段为300~430 MHz,根据仿真结果可知无人机系统线缆耦合薄弱环节在飞控线缆端口处。
-
表 1 耦合电感器参数
Table 1. Parameters of coupling inductor
L(P1)/nH L(P2)/nH L(S1, S2)/nH Lm(P1-S1, S2)/nH Lm(P2-S1, S2)/nH 173 139 639 233 203  下载: 导出CSV
下载: 导出CSV
-
[1] 饶俊峰, 宋子鸣, 王永刚, 等. 基于磁隔离驱动的亚微秒高压脉冲电源[J]. 强激光与粒子束, 2021, 33:115002 doi: 10.11884/HPLPB202133.210332Rao Junfeng, Song Ziming, Wang Yonggang, et al. Sub-microsecond high voltage pulse power supply based on magnetic isolated driving[J]. High Power Laser and Particle Beams, 2021, 33: 115002 doi: 10.11884/HPLPB202133.210332 [2] He Dazhao, Sun Wenjie, Liao Yixin, et al. A novel high-voltage solid-state switch based on the SiC MOSFET series and its overcurrent protection[J]. High Voltage, 2023, 8(4): 698-706. doi: 10.1049/hve2.12285 [3] Jiang W, Oshima N, Yokoo T, et al. Repetitive pulsed power based on semiconductor switching devices[C]//Proceedings of 2007 16th IEEE International Pulsed Power Conference. 2007: 550-552. [4] 李玺钦, 吴红光, 栾崇彪, 等. 基于MOSFET的纳秒级全固态脉冲源设计[J]. 强激光与粒子束, 2017, 29:045002 doi: 10.11884/HPLPB201729.160475Li Xiqin, Wu Hongguang, Luan Chongbiao, et al. Design of nanosecond all-solid-state pulse source based on MOSFET semiconductor switch[J]. High Power Laser and Particle Beams, 2017, 29: 045002 doi: 10.11884/HPLPB201729.160475 [5] Wang Liming, Zhang Zhengquan, Liu Qingxiang, et al. A solid-state pulse generator based on multilayer ceramic capacitors and insulated gate bipolar transistors[J]. Review of Scientific Instruments, 2020, 91: 054703. doi: 10.1063/1.5144479 [6] 朱晓光, 张政权, 刘庆想, 等. 脉冲功率应用的IGBT快速驱动电路[J]. 强激光与粒子束, 2018, 30:015001 doi: 10.11884/HPLPB201830.170330Zhu Xiaoguang, Zhang Zhengquan, Liu Qingxiang, et al. High speed IGBT gate driving circuit applied to pulsed power system[J]. High Power Laser and Particle Beams, 2018, 30: 015001 doi: 10.11884/HPLPB201830.170330 [7] 孙瑞泽, 陈万军, 刘超, 等. 压控型脉冲功率半导体器件技术及应用[J]. 强激光与粒子束, 2024, 36:095001 doi: 10.11884/HPLPB202436.240120Sun Ruize, Chen Wanjun, Liu Chao, et al. Technology and application of the voltage-controlled pulse power semiconductor devices[J]. High Power Laser and Particle Beams, 2024, 36: 095001 doi: 10.11884/HPLPB202436.240120 [8] Chen Wanjun, Liu Chao, Tang Xuefeng, et al. Experimentally demonstrate a cathode short MOS-controlled thyristor (CS-MCT) for single or repetitive pulse applications[C]//Proceedings of 2016 28th International Symposium on Power Semiconductor Devices and ICs (ISPSD). 2016: 311-314. [9] 刘超. MOS栅控脉冲功率器件模型与新结构研究[D]. 成都: 电子科技大学, 2020Liu Chao. Novel structure and model of MOS gate pulse power devices[D]. Chengdu: University of Electronic Science and technology, 2020 [10] Wu Feiyu, Zhao Lisheng, Dong Shoulong, et al. Magnetic coupling resonant-based air-isolated module for high voltage pulse generators[J]. IEEE Transactions on Industrial Electronics, 2023, 70(3): 2431-2439. doi: 10.1109/TIE.2022.3165285 [11] Li Zi, Liu Haotian, Jiang Song, et al. A new driving circuit with delay trigger for the solid-state Marx modulators[J]. IEEE Transactions on Plasma Science, 2021, 49(6): 1906-1914. doi: 10.1109/TPS.2021.3077601 [12] Rao Junfeng, Zeng Tong, Jiang Song, et al. Synchronous drive circuit with current limitation for solid-state pulsed power modulators[J]. IET Power Electronics, 2020, 13(1): 60-67. doi: 10.1049/iet-pel.2019.0421 -



 下载:
下载:



































 点击查看大图
点击查看大图

计量
- 文章访问数: 189
- HTML全文浏览量: 65
- PDF下载量: 37
- 被引次数: 0
