

Upgrade of CSRe beam diagnostic control system based on EPICS
-
摘要: 兰州重离子加速器(HIRFL)冷却存储环的实验环(CSRe)提供高品质的束流用于高精度的质量测量、原子物理等实验研究,实现束流参数的准确测量是进行物理实验的前提保障。目前,CSRe加速器控制系统已升级为EPICS架构。介绍了基于EPICS的束流诊断控制系统现状,并利用升级后的控制系统测量了束流相关参数。其中,束流位置系统能够测量注入束流的逐圈位置信息,测量结果发现束流在注入过程中存在一定程度的震荡,影响注入效率。流强测量系统通过高分辨的数据采集卡实现对DCCT信号的精确测量,同时增加了D事例触发功能。升级后的控制系统,可以实现束流参数的测量,并集成于加速器控制系统的EPICS CSS界面。Abstract: The experimental Cooling Storage Ring (CSRe) of the Heavy Ion Research Facility in Lanzhou (HIRFL) provides high-quality beam for high-precision mass measurement, atomic physics and other experimental studies. Consequently, accurate measurement of beam parameters is the prerequisite for physical experiments. At present, the control system of CSRe has been upgraded to the EPICS architecture. This paper introduces the current status of the beam diagnostics control system based on EPICS which is affiliated with the accelerator control system. Moreover, some of the beam parameters are measured and analyzed by the upgraded beam diagnostics control system. According to the test results with beam at CSRe, the beam position control system can measure the turn-by-turn position of the injected beam. Furthermore, the calculated turn-by-turn position results show that there is a certain degree of oscillation during the injection process, which affects the injection efficiency directly. The beam current measurement system can achieve precise measurement with DCCT by upgrading a high-resolution data acquisition card, in addition, the D event trigger has been integrated into the beam current control system for receiving the trigger and synchronized information from the virtual accelerator. The upgraded control system is running stably and can measure the beam parameters since the upgrade in 2018 and has been integrated into the graphical user interface (GUI) of the accelerator control system.
-
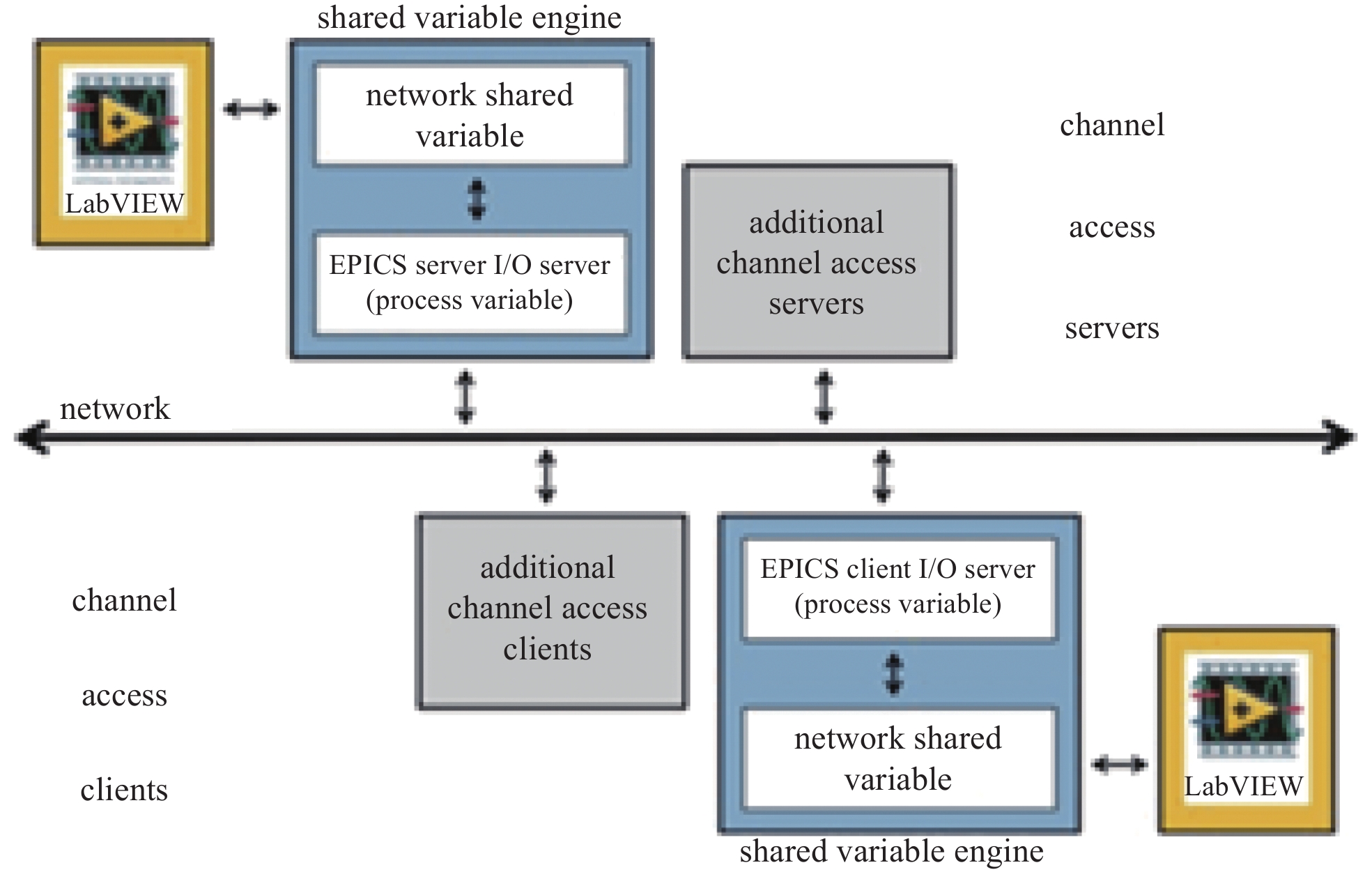
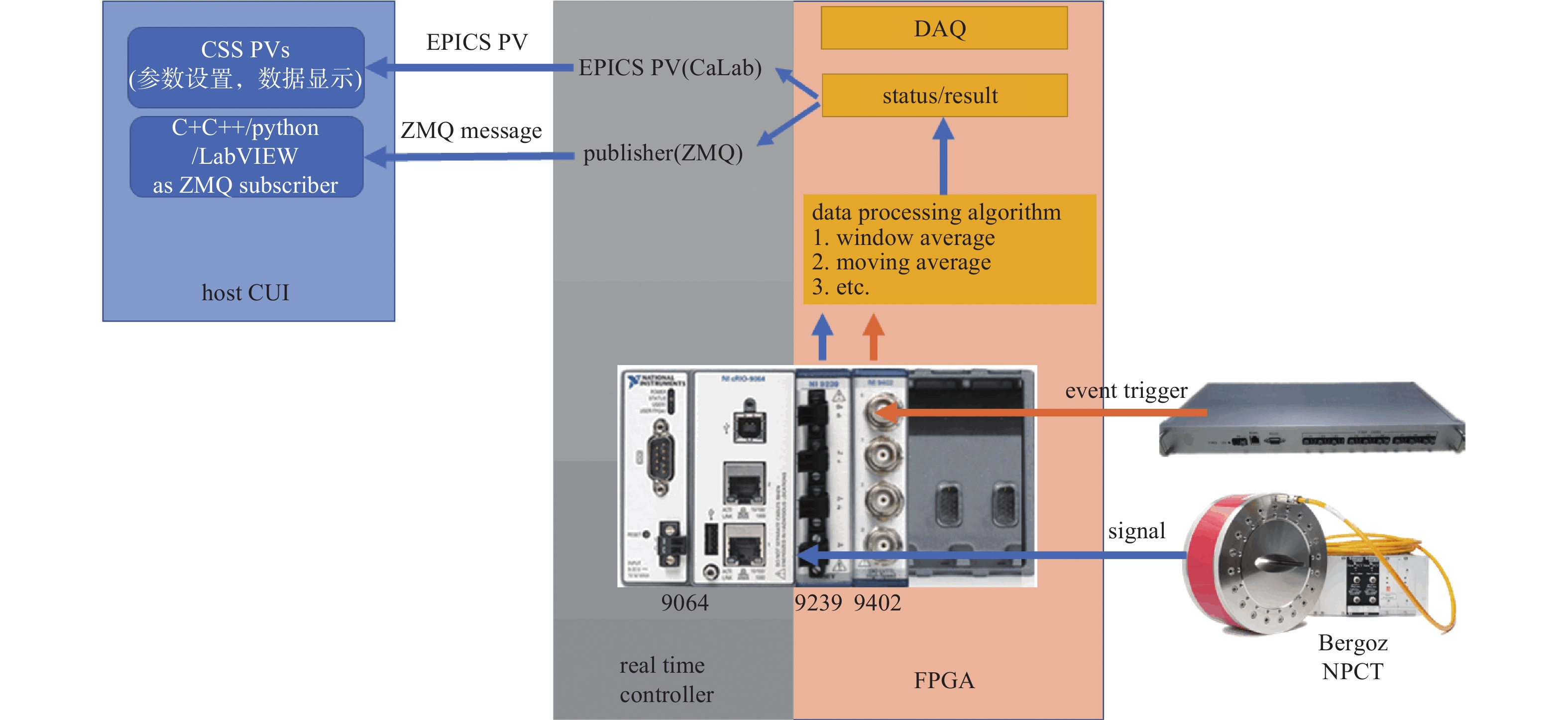
图 3 LabVIEW与EPICS网络之间的数据交互接口
Figure 3. Data exchange interface between LabVIEW and EPICS
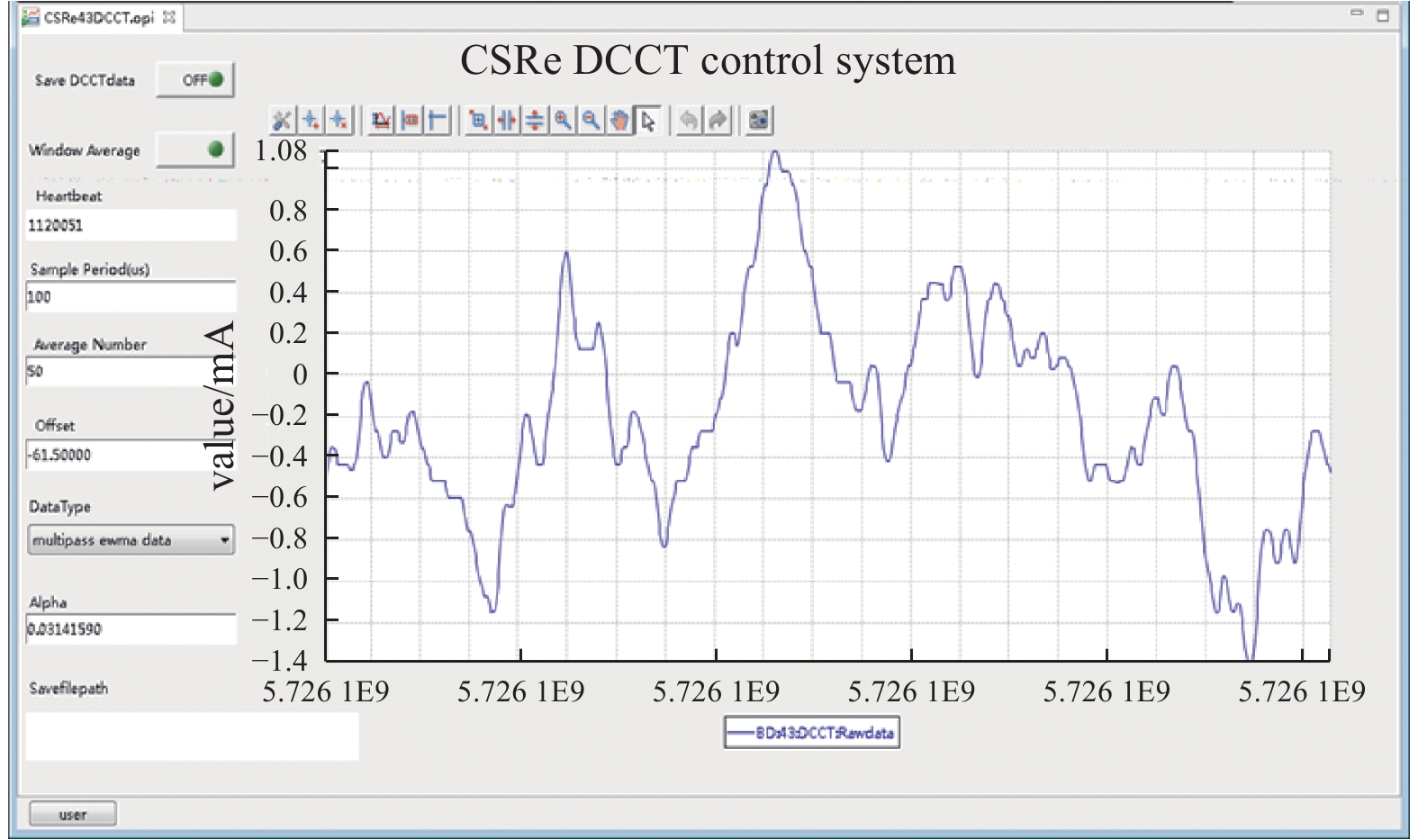
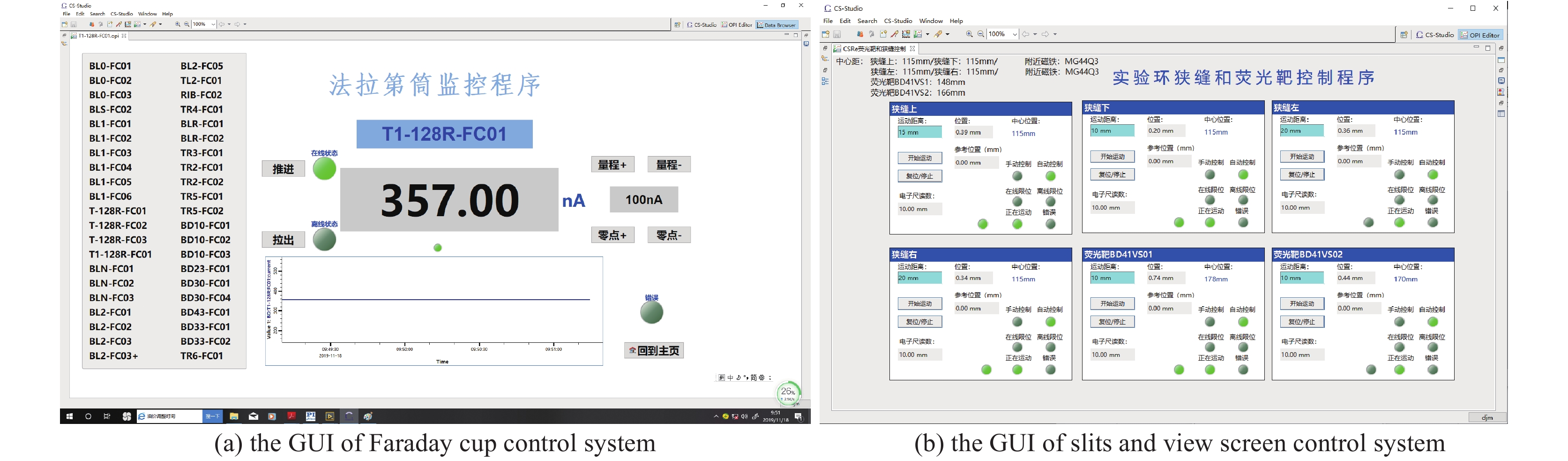
图 6 基于CSS开发的CSRe DCCT界面
Figure 6. GUI of the DCCT control system at CSRe developed with CSS
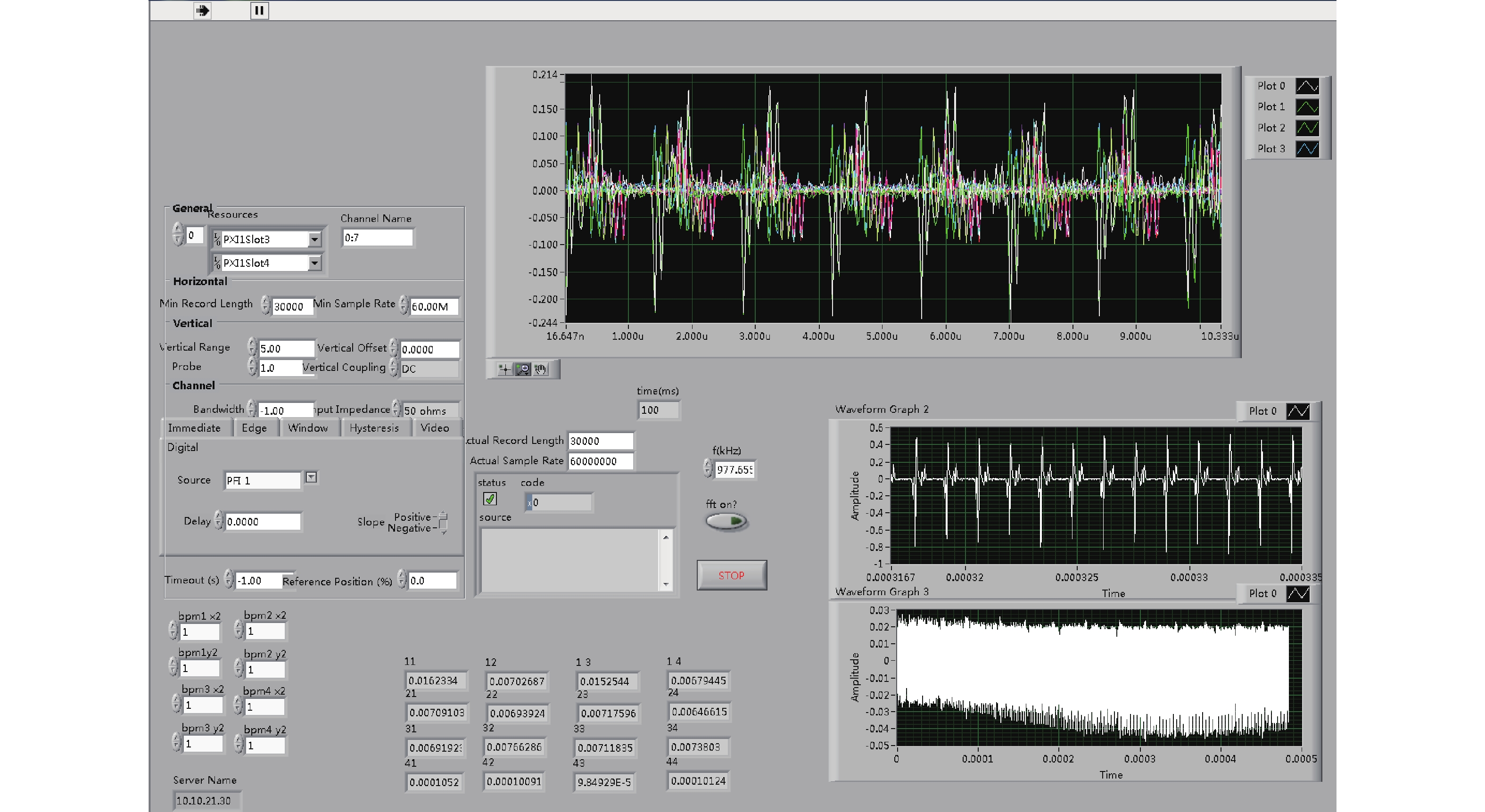
图 7 基于LabVIEW的升级前的BPM数据采集系统界面
Figure 7. Data acquisition system of BPM control system based on LabVIEW before the upgrade
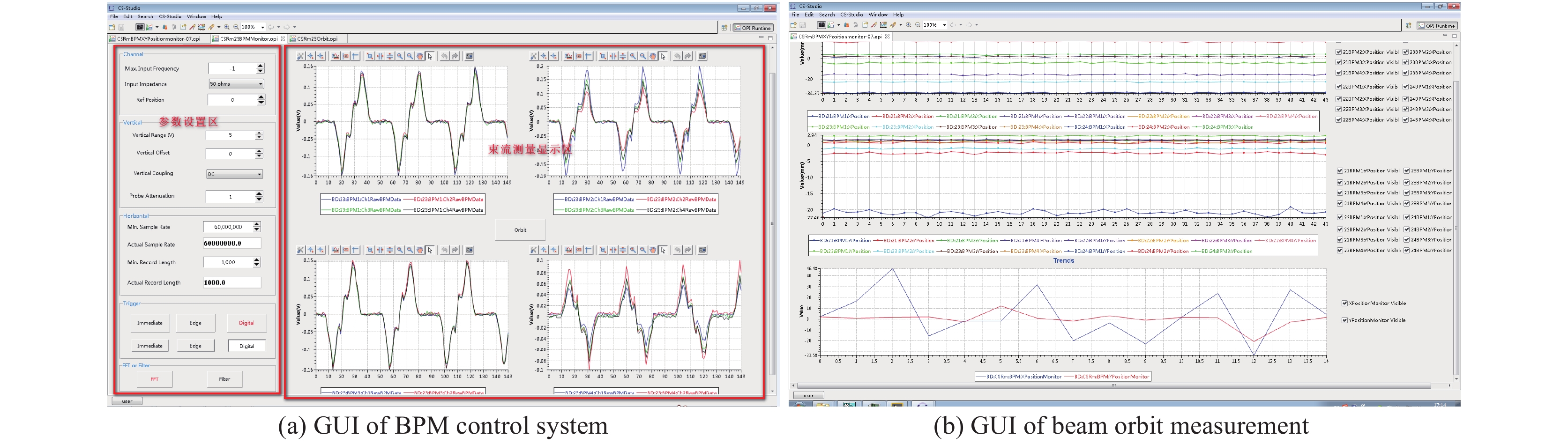
图 8 升级后BPM测试及轨道测量界面
Figure 8. Beam position and beam orbit GUIs of BPM control system after upgrade
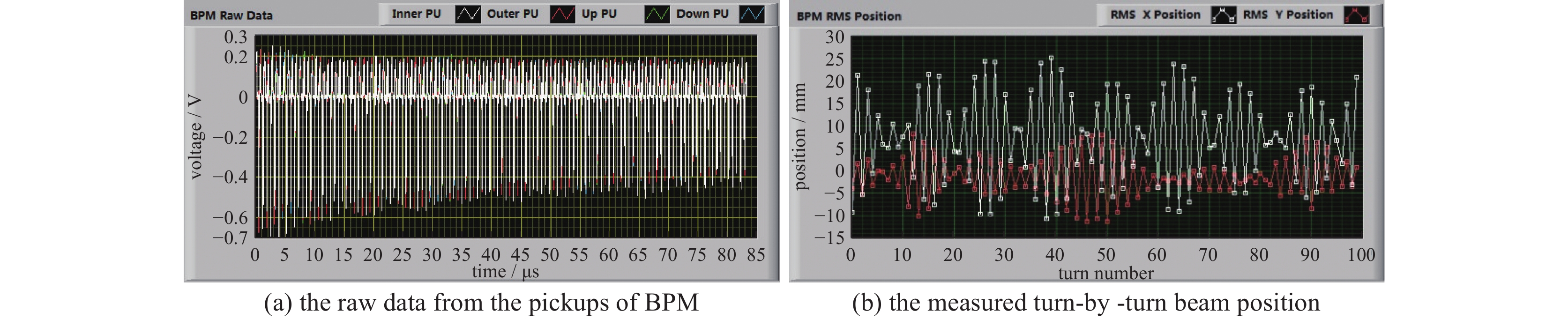
图 9 CSRe注入点处的BPM测量的测量结果
Figure 9. Beam position measurement results at the injection of CSRe
-
[1] 毛瑞士. CSR闭轨测量系统的建立[D]. 兰州: 中国科学院近代物理研究所, 2008.Mao Ruishi. The closed-orbit measurement system of CSR. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2008 [2] 夏佳文, 詹文龙, 魏宝文, 等. 兰州重离子加速器冷却储存环[J]. 强激光与粒子束, 2008, 20(11):1787-1794. (Xia Jiawen, Zhan Wenlong, Wei Baowen, et al. Heavy ion cooler-storage-ring synchrotron in Lanzhou. High Power Laser and Particle Beams, 2008, 20(11): 1787-1794 [3] 顾科伟. EPICS在CSRe控制系统中的应用[D]. 兰州: 中国科学院近代物理研究所, 2016.Gu Kewei. The application of EPICS in CSRe control system. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2016 [4] 张德敏, 金晓, 黎明, 等. EPICS在加速器控制系统中的应用[J]. 强激光与粒子束, 2008, 20(4):597-600. (Zhang Demin, Jin Xiao, Li Ming, et al. Application of EPICS to accelerator control system. High Power Laser and Particle Beams, 2008, 20(4): 597-600 [5] 葛良, 张玮, 安石, 等. HIRFL-CSRm电源监测系统[J]. 强激光与粒子束, 2019, 31:025102. (Ge Liang, Zhang Wei, An Shi, et al. HIRFL-CSRm power supply monitoring system. High Power Laser and Particle Beams, 2019, 31: 025102 [6] 邰禄. 基于 CompactRIO 的对撞区特种磁铁快速温度保护系统设计[D]. 北京: 中国科学院高能物理研究所, 2018.Tai Lu. Rapid temperature protection system design based on CompactRIO for special magnet in BEPCⅡ. Beijing: Institute of High Energy Physics, Chinese Academy of Sciences, 2018 [7] Using the LabVIEW Shared Variable[EB/OL].http://www.ni.com/product-documentation/4679/en/. [8] Interactively Configuring EPICS I/O Servers[EB/OL]. http://www.ni.com/product-documentation/14149/en/. [9] Introduction to EPICS[EB/OL]. https://www.ni.com/en-us/innovations/white-papers/12/introduction-to-epics.html. [10] LabVIEW EPICS Client I/O Server 2011[EB/OL]. http://www.ni.com/download/labview-epics-client-io-server-2011/2533/en/. [11] CA Lab (LabVIEW + EPICS)[EB/OL]. https://www.helmholtz-berlin.de/zentrum/locations/it/software/exsteuer/calab/index_en.html. [12] 田立明. 基于CompactRIO的多通道数据采集系统的开发与设计[D]. 哈尔滨: 哈尔滨工程大学, 2015.Tian Liming.The development and design of multi channel data acquisition system based on compact RIO. Harbin: Harbin Engineering University, 2015 [13] Yi L I, Chen J, Cong F Y, et al. Data acquisition and analysis system of large frequency-converting blower based on NI CompactRIO[J]. Instrument Technique & Sensor, 2008, 37(8): 44-46. [14] ZeroMQ [EB/OL]. http://zeromq.org/ . [15] Message Queue [EB/OL]. https://en.wikipedia.org/wiki/Message_queue. [16] Sliwinski W, Yastrebov I, Dworak A. Middleware Proxy: a request-driven messaging broker for high volume data distribution[C] //Proc of ICALEPCS’13. 2013: 948-951. [17] Lauener J, Sliwinski W.How to design & implement a modern communication middleware based on ZeroMQ[C] //Proc of ICALEPCS'17. 2017: 45-51. [18] Chrin J, Aiba M, Rawat A, et al. Accelerator modelling and message logging with zeroMQ[C] //Proc of ICALEPCS’15. 2015: 610-614. [19] Ebner S G, Brands H, Kalantari B, et al. SwissFEL-beam synchronous data acquisition-the first year[C] //Proc of ICALEPCS’15. 2015: 276-279. [20] Yamashita A, Kago M. A new message-based data acquisition system for accelerator control[C] //Proc of ICALEPCS’13. 2013: 413-416. [21] New parametric current transformer user’s manual Rev.2.0[M/OL]. http://www.bergoz.com/sites/www.bergoz.com/files/npctmanual2-0.2017. [22] 李敏. HIMM束流诊断前端控制系统的设计与实现[D]. 兰州: 中国科学院近代物理研究所, 2015.Li Min. The design and implementation of front-end control system of beam diagnostics for HIMM. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2015 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1956
- HTML全文浏览量: 1273
- PDF下载量: 82
- 被引次数: 0
