

Analysis and research on new integrated motor-driving and charging topology
-
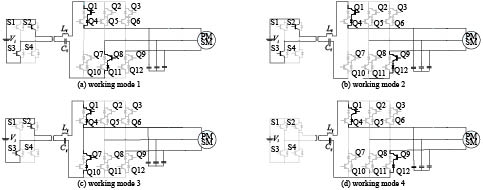
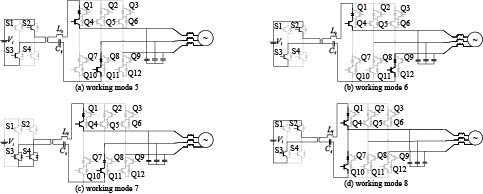
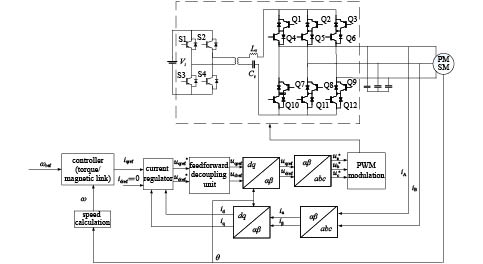
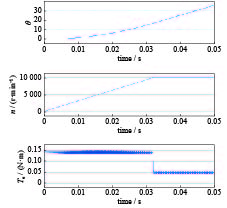
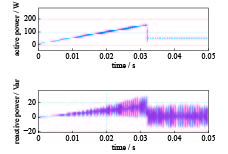
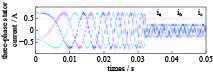
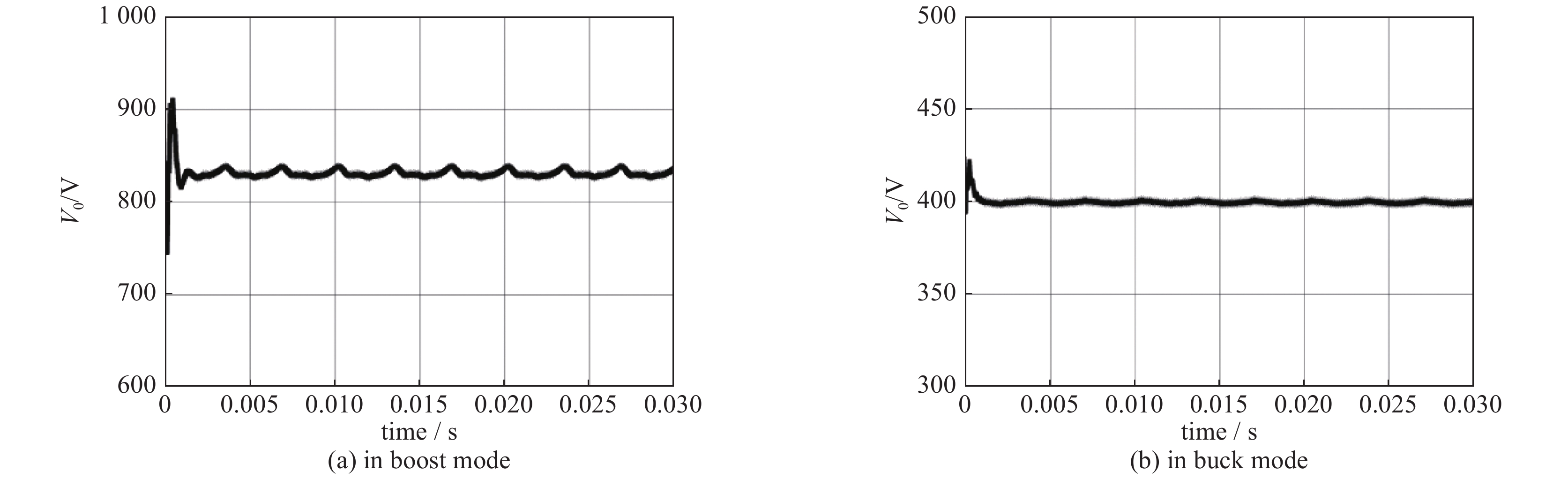
摘要: 提出了一种基于AC-link的新型电机驱动充电一体化拓扑结构,可以满足电机驱动控制和充电两种工作模式。该拓扑正向工作时驱动电机为电机驱动控制状态、反向工作时给蓄电池充电为充电状态。首先对该新型拓扑结构两种工作模式的工作原理进行详细介绍,采用有效的控制策略并使用Simulink软件搭建仿真模型,对一体化拓扑结构和控制策略进行验证,仿真结果表明,该拓扑工作在充电模式时可以满足电池全部充电阶段的不同电压需求;工作于电机驱动模式,无论是加速过程还是正常工作过程,定子电流均呈现良好的三相正弦形态,并且转速可以达到给定值,从而证明了这种拓扑结构和控制策略的可行性。Abstract: This paper proposes a novel motor-driving charging integrated topology with high-frequency AC link (HF AC-link), soft-switching operation and high-frequency (HF) galvanic isolation, which can apply to the two modes of motor driving control and charging. The topology belongs to a new class of resonant AC-link topology, and its link is composed of a series ac inductor/capacitor (LC) pair.When the topology is working in the forward direction, the driving motor is in the motor driving control state, and the battery is being charged in the backward working period. In this paper, the principle of operation of the two working modes of the new topology is introduced in detail. The effective control strategy is used and the simulation model is built by MATLAB/Simulink software. The integrated topology and control strategy are verified. The simulation results show that the topology works. The charging mode can meet the different voltage requirements of the whole charging phase of the battery; working in the motor driving mode, the stator current exhibits a good three-phase sinusoidal shape in both the acceleration process and the normal working process, and the rotation speed can reach a given value, thereby proving the feasibility of this topology and control strategy.
-
Key words:
- electric vehicle /
- motor drive /
- integration /
- AC-link /
- vector control
-
[1] 司宇. 电动汽车PMSM位置检测失效的安全控制策略研究[D]. 石家庄: 河北科技大学, 2019: 5-7.Si Yu. Research on safety control strategy of PMSM position detection failure of electric vehicle. Shijiazhuang: Hebei University of Science and Technology, 2019: 5-7 [2] 刘莹, 王辉, 漆文龙. 电动汽车驱动系统与蓄电池充电一体化混合拓扑研究综述[J]. 电力自动化设备, 2013, 33(10):143-149. (Liu Ying, Wang Hui, Qi Wenlong. A review of research on hybrid topologies integrating electric vehicle drive systems and battery charging[J]. Electric Power Automation Equipment, 2013, 33(10): 143-149 doi: 10.3969/j.issn.1006-6047.2013.10.025 [3] 高峰, 谈韵, 陶远鹏, 等. 电动汽车驱动充电一体化控制策略研究[J]. 电力工程技术, 2018, 37(2):73-76. (Gao Feng, Tan Yun, Tao Yuanpeng, et al. Research on integrated control strategy of electric vehicle drive and charge[J]. Electric Power Engineering Technology, 2018, 37(2): 73-76 [4] 张政权, 刘庆想, 李相强, 等. 高频交流链接技术充电电源[J]. 强激光与粒子束, 2012, 24(3):719-722. (Zhang Zhengquan, Liu Qingxiang, Li Xiangqiang, et al. Charging power supply with high frequency AC link technology[J]. High Power Laser and Particle Beams, 2012, 24(3): 719-722 [5] 张政权. 新型能量变换与控制技术在高功率微波系统中的应用研究[D]. 成都: 西南交通大学, 2012: 40-42.Zhang Zhengquan. Application research of new energy conversion and control technology in high power microwave system. Chengdu: Southwest Jiaotong University, 2012: 40-42 [6] 夏长亮, 阎彦. 矩阵变换器-永磁同步电机系统[J]. 电工技术学报, 2015, 30(23):1-9. (Xia Changliang, Yan Yan. Matrix converter-permanent magnet synchronous motor system[J]. Journal of Electrical Engineering and Technology, 2015, 30(23): 1-9 doi: 10.3969/j.issn.1000-6753.2015.23.001 [7] 武靖昊. 基于AC-Link串联谐振的Buck-Boost变换器的研究[D]. 成都: 西南交通大学, 2018: 7-11.Wu Jinghao. Research on buck-boost converter based on AC-link series resonance. Chengdu: Southwest Jiaotong University, 2018: 7-11 [8] 袁登科, 徐延东, 李秀涛. 永磁同步电动机变频调速系统及其控制[M]. 北京: 机械工业出版社, 2015: 20-25.Yuan Dengke, Xu Yandong, Li Xiutao. Variable frequency speed regulation system of permanent magnet synchronous motor and its control. Beijing: China Mechine Press, 2015: 20-25 [9] 张丹. 基于DSP的永磁同步电机伺服控制算法研究[D]. 成都: 西南交通大学, 2017: 10-12.Zhang Dan. Research on DSP-based servo control algorithm of PMSM. Chengdu: Southwest Jiaotong University, 2017: 10-12 [10] 卜朗. LC并联谐振矩阵变换器及其永磁同步电机控制系统[D]. 成都: 西南交通大学, 2018: 39-42.Bu Lang. LC parallel resonant matrix converter and its permanent magnet synchronous motor control system. Chengdu: Southwest Jiaotong University, 2018: 39-42 [11] 汤清泉, 颜世超, 卢松升, 等. 三电平逆变器的功率管开路故障诊断[J]. 中国电机工程学报, 2008, 28(21):26-32. (Tang Qingquan, Yan Shichao, Lu Songsheng, et al. Open-circuit fault diagnosis of three-level inverter power tube[J]. Proceedings of the CSEE, 2008, 28(21): 26-32 -

 下载:
下载:
 点击查看大图
点击查看大图

图(8)
计量
- 文章访问数: 1777
- HTML全文浏览量: 513
- PDF下载量: 42
- 被引次数: 0
