

Optical cavity self-collimation research method based on image processing
-
摘要:
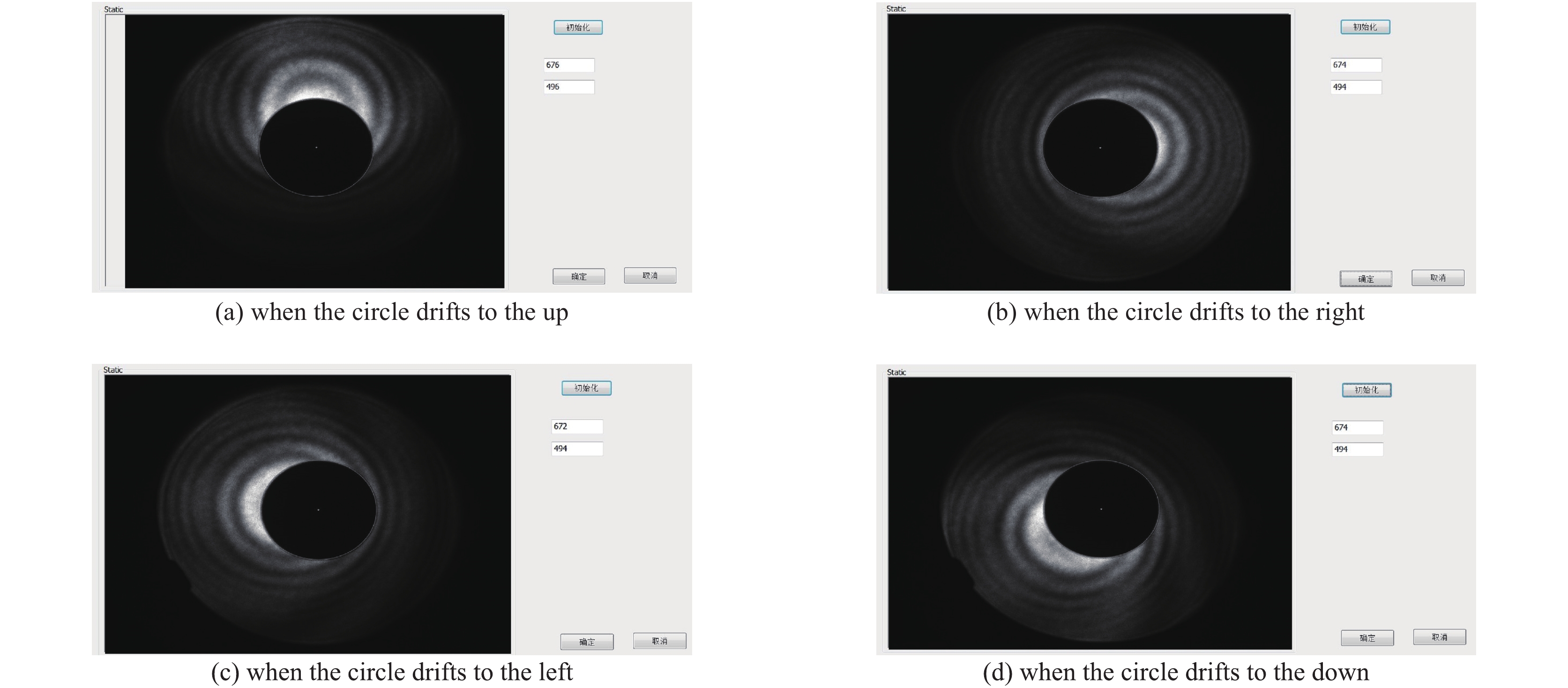
针对我国氧碘化学激光器输出能量不断提高的情况下,主要限制光束质量的因素之一是出光过程中的光腔失调,提出了一种基于图像处理的光学谐振腔自准直研究方法。该研究方法利用氦氖穿腔光通过凹腔镜中心孔,并在凸腔镜后方放置工业相机,在屏幕上方形成一个干涉同心圆环。通过借助OpenCV库中二值化、霍夫圆检测等图像处理的方法,获得干涉同心圆环的圆心坐标,再通过以圆心为中心将图像分成上下左右四个部分,通过判断这四部分亮点像素的数量差值来预估干涉同心圆环的偏移状态,进而获得空腔条件下光学谐振腔发生变化的理论判据。实验结果表明,该方法可以获得相当精准的光学谐振腔失调判据,其失调判据选取左右亮点像素差值30 000,上下亮点像素差值45 000,为今后失调判据与步进电机自动调腔的结合做好充足的准备。
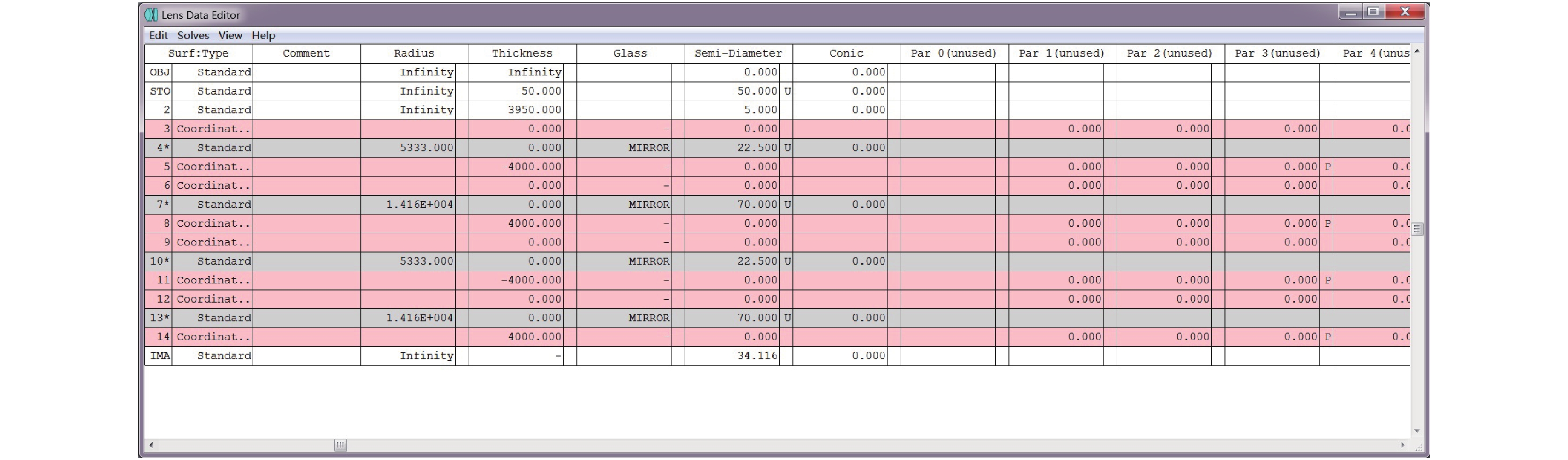
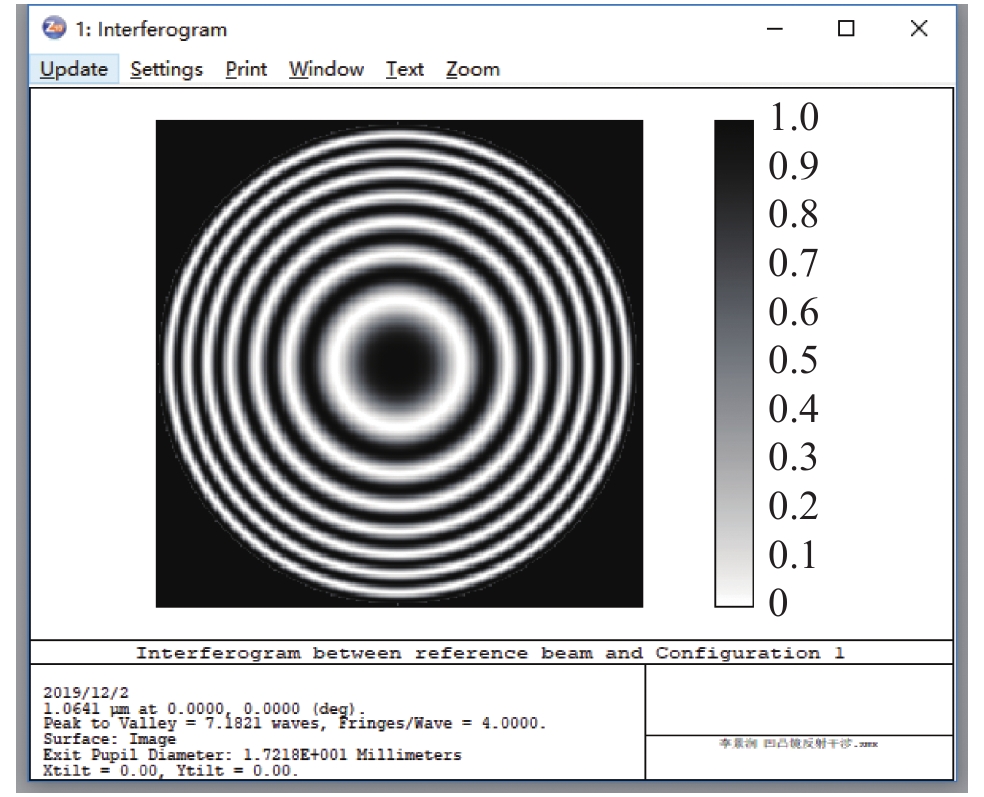
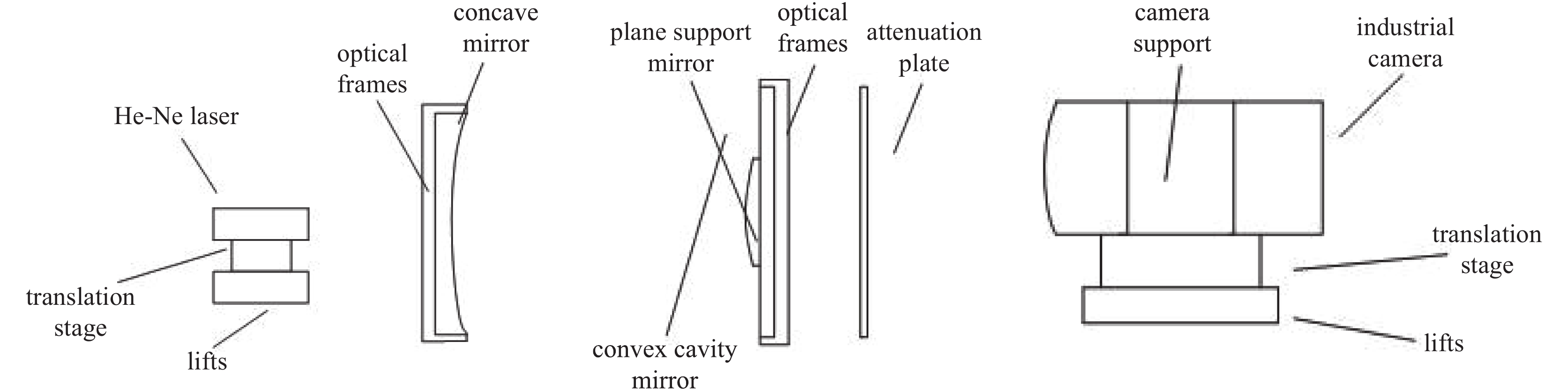
Abstract:Aiming at the fact that with the increasing output energy of oxygen-iodine chemical lasers in China, one of the main factors limiting the quality of the beam is the misalignment of the optical cavity during the light emission process, a method for self-collimation of optical resonators based on image processing was proposed. This research method uses helium-neon light to pass through the central hole of the concave cavity mirror, and an industrial camera is placed behind the convex cavity mirror to form an interference concentric ring above the screen. Through the image processing methods such as binarization and Hoff circle detection in the OpenCV library, the center coordinates of the interference concentric ring are obtained, and the image is divided into four parts: upper, lower, left, and right. The difference of the number of bright pixels between these four parts is used to estimate the offset state of the interference concentric ring, and then the theoretical criterion for the change of the optical resonator under the cavity condition is obtained. The experimental results show that this method can obtain quite accurate optical resonance cavity misalignment criterion. The misalignment criterion is selected from the difference between the left and right bright pixels of 30 000, and the difference between the upper and lower bright pixels of 45 000.
-
表 1 干涉同心圆环不发生偏转,干涉同心圆环上下左右亮点像素个数与差值大小
Table 1. Interference concentric ring does not deflect,the number of pixels and the difference between the bright dots on the top,bottom,left and right of the interference concentric ring
number of pixels on
the left of the center
of the circlenumber of pixels on
the right of the center
of the circleleft and right
difference absolute
valuenumber of pixels
above the center
of the circle (top)number of pixels
under the center
of the circle (bottom)top and bottom
difference absolute
value150 710 150 363 347 161 115 139 907 21 208 118 446 118 944 −498 127 191 110 187 17 004 105 721 109 406 −3 685 115 120 99 954 15 166 134 828 127 356 7 472 146 931 115 076 31 855 119 957 120 749 −792 128 397 112 287 16 110 153 853 143 298 10 555 166 214 130 755 35 459 127 163 111 782 15 381 132 566 106 240 26 326 152 432 155 565 −3 133 162 320 145 630 16 690 169 367 171 146 −1 779 188 648 151 679 36 969 173 025 173 278 −253 185 219 160 984 24 235 107 727 108 901 −1 174 119 281 97 274 22 007 119 220 114 936 4 284 124 845 104 233 20 612 142 698 137 765 4 933 149 384 131 028 18 356 168 131 168 945 −814 179 462 157 529 21 933 149 420 155 244 −5 824 167 163 137 327 29 836 158 102 152 588 5 514 166 537 144 063 22 474 143 257 128 863 14 394 149 602 122 352 27 250 116 565 116 573 −8 126 613 106 466 20 147 106 954 110 558 −3 604 119 237 98 239 20 998 165 295 161 699 3 596 180 566 146 267 34 299 139 435 138 201 1 234 146 345 131 259 15 086 171 428 170 506 922 188 178 153 594 34 584 114 648 116 670 −2 022 122 574 108 725 13 849 165 974 163 659 2 315 179 532 149 950 29 582 109 090 113 982 −4 892 119 492 103 546 15 946 147 150 138 862 8 288 157 155 128 744 28 411 173 151 173 071 80 185 642 160 464 25 178 170 118 169 454 664 178 271 161 243 17 028  下载: 导出CSV
下载: 导出CSV
表 2 干涉同心圆环向右发生偏转,干涉同心圆环上下左右亮点像素个数与差值大小
Table 2. Interference concentric ring is deflected to the right,the number of pixels and the difference between the bright dots on the top,bottom,left and right of the interference concentric ring
number of pixels on
the left of the center
of the circlenumber of pixels on
the right of the center
of the circleleft and right
difference absolute
valuenumber of pixels
above the center
of the circle (top)number of pixels
under the center
of the circle (bottom)top and bottom
difference absolute
value67 212 223 701 156 489 151 545 139 233 12 312 67 991 203 445 135 454 146 220 125 106 21 114 80 378 159 390 79 012 132 451 107 161 25 290 81 498 176 257 94 759 140 036 117 521 22 515 70 015 207 060 137 045 146 641 130 362 16 279 73 964 185 315 111 351 142 908 116 171 26 737 83 102 148 089 64 987 124 351 106 768 17 583 76 410 176 770 100 360 137 860 115 292 22 568 64 843 223 274 158 431 151 498 136 499 14 999 73 207 193 419 120 212 144 665 121 746 22 919 75 443 176 401 100 958 136 013 115 828 20 185 72 769 218 649 145 880 155 244 136 114 19 130 68 176 203 582 135 406 145 230 126 419 18 811 83 543 143 003 59 460 121 431 105 134 16 297 78 941 163 106 84 165 130 758 111 323 19 435 85 203 140 712 55 509 121 341 104 546 16 795 76 948 187 198 110 250 142 288 121 877 20 411 67 792 215 021 147 229 151 313 131 361 19 952 75 851 179 249 103 398 137 720 117 315 20 405 72 056 205 191 133 135 148 111 128 942 19 169 80 447 161 401 80 954 133 824 107 848 25 976 73 018 199 858 126 840 148 344 124 334 24 010 81 293 160 227 78 934 133 233 108 159 25 074 72 407 207 401 134 994 148 165 131 639 16 526 17 664 211 257 193 593 121 110 107 674 13 436 28 033 200 805 172 772 119 806 108 880 10 926 18 512 204 730 186 218 116 223 106 931 9 292 21 188 212 485 191 297 124 590 108 919 15 671
下载: 导出CSV
表 3 干涉同心圆环向左发生偏转,干涉同心圆环上下左右亮点像素个数与差值大小
Table 3. The interference concentric ring is deflected to the left,and the number of pixels and the difference between the bright dots on the top,bottom,left,and right of the interference concentric ring are deflected
number of pixels on
the left of the center
of the circlenumber of pixels on
the right of the center
of the circleleft and right
difference absolute
valuenumber of pixels
above the center
of the circle (top)number of pixels
under the center
of the circle (bottom)top and bottom
difference absolute
value192 314 52 255 140 059 142 574 101 844 40 730 229 577 47 856 181 721 157 423 119 803 37 620 214 631 47 848 166 783 149 527 112 862 36 665 202 363 46 299 156 064 143 299 105 297 38 002 203 765 49 982 153 783 147 673 105 863 41 810 228 985 48 638 180 347 155 875 121 537 34 338 210 921 53 734 157 187 145 497 119 082 26 415 226 174 48 803 177 371 152 282 122 542 29 740 191 768 51 614 140 154 142 192 101 021 41 171 199 888 50 107 149 781 145 717 104 109 41 608 230 226 45 781 184 445 153 651 122 207 31 444 197 829 48 687 149 142 144 154 102 274 41 880 198 439 48 554 149 885 143 359 103 545 39 814 228 478 48 736 179 742 155 472 121 550 33 922 221 287 48 660 172 627 152 940 116 790 36 150 188 684 50 234 138 450 138 092 100 775 37 317 227 902 50 225 177 677 156 301 121 616 34 685 216 518 21 413 195 105 137 346 100 353 36 993 218 200 22 530 195 670 138 716 101 831 36 885 209 917 23 301 186 616 136 289 96 786 39 503 223 064 20 969 202 095 141 508 102 315 39 193 225 719 20 984 204 735 143 473 102 999 40 474 208 883 22 815 186 068 136 065 95 463 40 602 221 445 22 227 199 218 141 612 101 866 39 746 225 780 21 538 204 242 143 149 103 926 39 223 200 232 26 669 173 563 128 817 97 983 30 834 210 864 23 623 187 241 137 469 96 836 40 633 203 253 26 655 176 598 133 668 96 141 37 527
下载: 导出CSV
表 4 干涉同心圆环向上发生偏转,干涉同心圆环上下左右亮点像素个数与差值大小
Table 4. The interference concentric ring is deflected upward,and the number of pixels and the difference between the bright dots on the top,bottom,left and right of the interference concentric ring
number of pixels on
the left of the center
of the circlenumber of pixels on
the right of the center
of the circleleft and right
difference absolute
valuenumber of pixels
above the center
of the circle (top)number of pixels
under the center
of the circle (bottom)top and bottom
difference absolute
value136 172 132 298 3 874 227 325 41 119 186 206 129 489 122 733 6 756 200 340 51 887 148 453 126 496 116 854 9 642 201 074 42 183 158 891 121 423 128 708 −7 285 220 518 29 574 190 944 137 995 128 368 9 627 222 623 43 685 178 938 128 997 128 443 554 230 754 26 714 204 040 132 453 120 362 12 091 196 773 56 054 140 719 134 189 133 298 891 231 966 35 508 196 458 134 525 120 377 14 148 209 976 44 841 165 135 137 203 128 560 8 643 215 032 50 688 164 344 129 555 124 647 4 908 208 360 45 885 162 475 132 845 124 594 8 251 204 053 53 392 150 661 119 411 124 457 −5 046 209 126 34 684 174 442 128 035 130 239 −2 204 229 146 29 125 200 021 122 666 110 222 12 444 222 546 10 494 212 052 128 976 116 031 12 945 233 039 12 078 220 961 129 350 120 178 9 172 240 208 9 465 230 743 121 845 113 214 8 631 223 511 11 672 211 839 126 511 113 857 12 654 226 685 13 777 212 908 131 166 114 407 16 759 234 193 11 500 222 693 122 526 117 807 4 719 230 761 9 719 221 042 131 432 120 228 11 204 240 533 11 251 229 282 124 978 117 650 7 328 235 412 7 384 228 028 127 081 115 916 11 165 231 248 11 860 219 388 125 773 115 399 10 374 229 051 12 224 216 827 121 264 114 572 6 692 224 936 11 026 213 910 129 720 119 720 10 000 238 693 10 875 227 818 129 597 114 550 15 047 235 807 8 494 227 313
下载: 导出CSV
表 5 干涉同心圆环向下发生偏转,干涉同心圆环上下左右亮点像素个数与差值大小
Table 5. The interference concentric ring is deflected downward,and the number of pixels and the difference between the bright dots on the top,bottom,left and right of the interference concentric ring
number of pixels on
the left of the center
of the circlenumber of pixels on
the right of the center
of the circleleft and right
difference absolute
valuenumber of pixels
above the center
of the circle (top)number of pixels
under the center
of the circle (bottom)top and bottom
difference absolute
value131 272 144 841 −13 569 49 313 226 819 177 506 125 072 134 698 −9 626 36 692 223 023 186 331 132 521 146 542 −14 021 43 455 235 617 192 162 122 593 143 530 −20 937 51 478 214 616 163 138 132 688 135 034 −2 346 43 453 224 261 180 808 130 408 144 669 −14 261 41 760 233 318 191 558 133 906 137 991 −4 085 46 098 225 792 179 694 127 261 135 658 −8 397 35 985 226 913 190 928 119 619 121 666 −2 047 37 033 204 231 167 198 132 054 140 840 −8 786 50 785 222 172 171 387 124 653 145 920 −21 267 59 007 211 560 152 553 116 229 126 427 −10 198 36 656 205 946 169 290 121 717 125 277 −3 560 35 769 211 203 175 434 132 177 137 829 −5 652 50 487 219 528 169 041 132 867 130 443 2 424 106 279 156 975 50 696 142 770 140 968 1 802 104 139 179 479 75 340 129 679 143 125 −13 446 69 603 203 178 133 575 132 483 151 991 −19 508 71 387 213 094 141 707 139 753 153 992 −14 239 71 849 221 839 149 990 132 423 153 088 −20 665 71 420 214 095 142 675 139 085 139 757 −672 91 837 186 924 95 087 135 971 134 909 1 062 97 702 173 093 75 391 142 437 157 671 −15 234 78 107 221 921 143 814 136 040 133 516 2 524 108 136 161 317 53 181 130 392 141 900 −11 508 63 580 208 716 145 136 130 815 135 792 −4 977 103 930 162 699 58 769 129 485 135 176 −5 691 73 770 190 890 117 120 133 012 138 664 −5 652 22 155 249 612 227 457
下载: 导出CSV
-
[1] 熊木地, 贾思楠, 张增宝, 等. 三点式氧碘化学激光器光腔准直技术[J]. 强激光与粒子束, 2007, 19(11):1812-1816. (Xiong Mudi, Jia Sinan, Zhang Zengbao, et al. Optical cavity collimation technology of three-point oxygen-iodine chemical laser[J]. High Power Laser and Particle Beams, 2007, 19(11): 1812-1816 [2] 尹新华, 梁永辉, 谢文科, 等. 正支共焦非稳腔的自动准直调整实验研究[J]. 光学与光电技术, 2009, 7(2):86-89. (Yin Xinhua, Liang Yonghui, Xie Wenke, et al. Experimental research on automatic collimation adjustment of positively supported confocal unstable cavity[J]. Optics and Optoelectronics, 2009, 7(2): 86-89 doi: 10.3969/j.issn.1672-3392.2009.02.023 [3] 尹新华. 基于SPGD优化算法的正支共焦非稳腔自动准直调整技术研究[D]. 长沙: 国防科学技术大学, 2008.Yin Xinhua. Research on positive collimation and confocal unstable cavity automatic collimation adjustment technology based on SPGD optimization algorithm[D]. Changsha: National University of Defense Technology, 2008 [4] 许晨晨, 戴舒, 张保俊, 等. 基于Matlab的图像直方图选择去噪方法[J]. 计算机与网络, 2019, 45(16):34-35. (Xu Chenchen, Dai Shu, Zhang Baojun, et al. Denoising method of image histogram selection based on Matlab[J]. Computer and Network, 2019, 45(16): 34-35 doi: 10.3969/j.issn.1008-1739.2019.16.031 [5] 胡亚红, 邓年茂, 何俊华, 等. 激光谐振腔自动稳定调节的一种方法[J]. 光子学报, 2001, 30(7):871-874. (Hu Yahong, Deng Nianmao, He Junhua, et al. A method for automatic stable adjustment of laser resonant cavity[J]. Journal of Photonics, 2001, 30(7): 871-874 [6] 王亚妮, 胡有宁, 李广文. 基于最小二乘法的圆柱体油罐装置拟合[J]. 西安文理学院学报(自然科学版), 2017, 20(6):11-14. (Wang Ya'ni, Hu Youning, Li Guangwen. Fitting of cylindrical oil tank device based on least square method[J]. Journal of Xi'an University of Arts and Science (Natural Science Edition), 2017, 20(6): 11-14 [7] 于彭, 蒋理兴, 王安成, 等. 外缺圆圆心检测[J]. 测绘与空间地理信息, 2018, 41(7):207-211. (Yu Peng, Jiang Lixing, Wang Ancheng, et al. Outer circle center detection[J]. Surveying and Spatial Geographic Information, 2018, 41(7): 207-211 doi: 10.3969/j.issn.1672-5867.2018.07.058 [8] 沈新平, 彭刚, 袁志强. 基于霍夫变换和RANSAC算法的绝缘子定位方法[J]. 电子测量技术, 2017, 40(6):132-137. (Shen Xinping, Peng Gang, Yuan Zhiqiang. Insulator positioning method based on Hough transform and RANSAC algorithm[J]. Electronic Measurement Technology, 2017, 40(6): 132-137 doi: 10.3969/j.issn.1002-7300.2017.06.030 [9] 仲崇权, 赵亮. 基于霍夫变换的工位点识别算法设计与实现[J]. 物联网技术, 2016, 6(8):14-17. (Zhong Chongquan, Zhao Liang. Design and implementation of station identification algorithm based on hough transform[J]. Internet of Things Technology, 2016, 6(8): 14-17 [10] 毛庆洲, 潘志敏, 高文武. 利用迭代霍夫圆变换实现成捆棒材可靠计数[J]. 武汉大学学报(信息科学版), 2014, 39(3):373-378. (Mao Qingzhou, Pan Zhimin, Gao Wenwu. Using iterative Hough round transform and connected area to count steel bars reliabley[J]. Geomatics and Information Science of Wuhan University, 2014, 39(3): 373-378 -




 点击查看大图
点击查看大图
计量
- 文章访问数: 1880
- HTML全文浏览量: 501
- PDF下载量: 53
- 被引次数: 0
