

Cavity beam position monitor design optimization and offline test for BEPCII
-
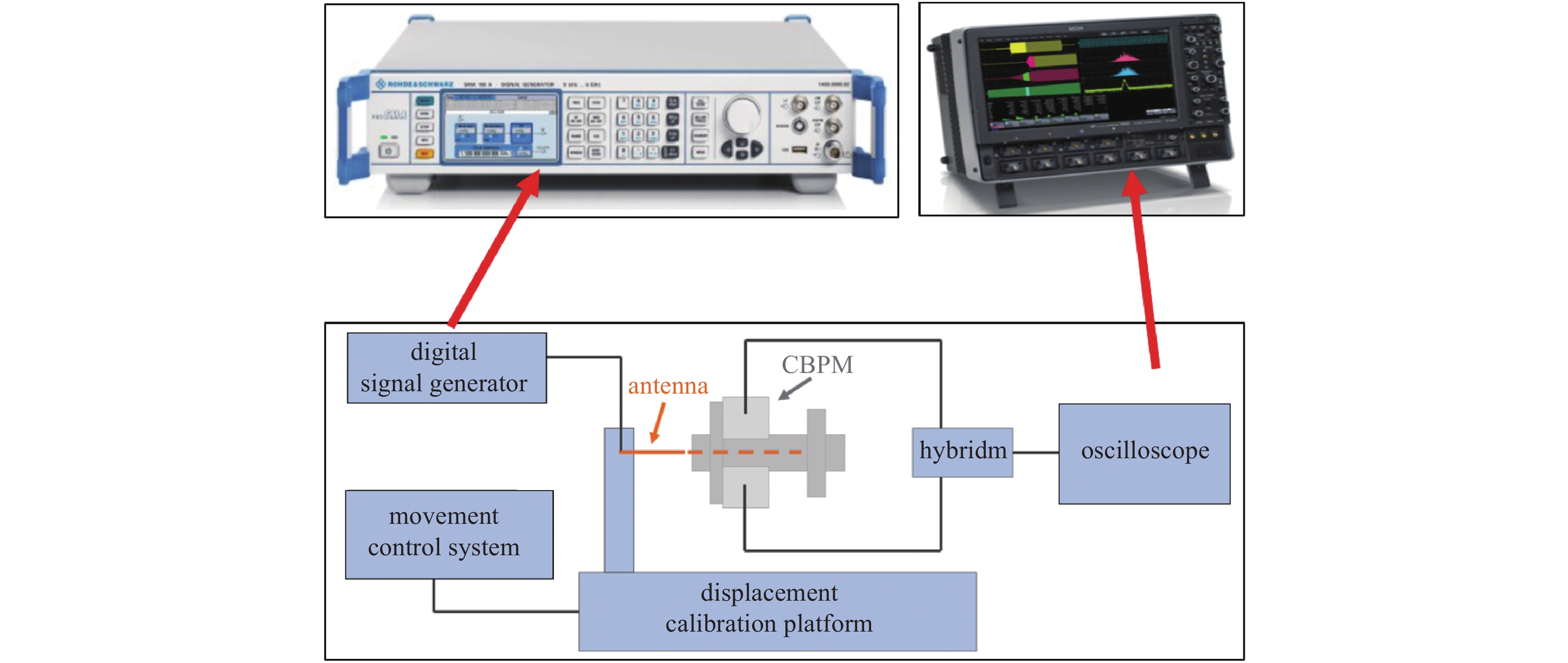
摘要: 研究了基于BEPCⅡ直线加速器的腔式束流位置探测系统(CBPM)的设计。本方案给出的CBPM探头工作频率为S波段,束流管道半径23 mm,参考腔TM010工作频率和位置腔TM110的工作频率一致。由线下测试结果可知,CBPM实物特征参数与仿真结果一致,CBPM水平和垂直方向工作频率分别为2502 MHz和2503 MHz;垂直和水平的四个端口交叉隔离度均优于−44.7 dB;测量线性区域好于10 mm。射频前端电子学负责对CBPM探头的模拟信号进行滤波、放大和下变频等调制。将CBPM探头置于标定平台,对经过CBPM信号进行时域和频域分析,通过计算得到CBPM水平、垂直方向线下分辨率分别为2.87 μm、2.16 μm。
-
关键词:
- BEPCⅡ /
- 腔式束流位置探测系统 /
- TM110 /
- 交叉隔离度 /
- 分辨率
Abstract: In BEPCⅡ, button BPM and stripline BPM cannot reach sufficient precise resolution for beam transverse displacement. This project aims at the design of cavity BPM for BEPCⅡ linac. Position cavity in cavity beam position monitor (CBPM) is an re-entrant resonator with four rectangular waveguides. TM110 mode frequency is chosen in S band, and the radius of beam pipe is 23 mm. TM010 mode in reference cavity is almost as same as TM110 mode in position cavity. According to the results of offline test, characterized parameters of CBPM coincided with computer simulated data. The frquency of TM110 mode are 2502 MHz in horizontal direction and 2503 MHz in vertical direction. Cross-talk isolation for position cavity is better than −44.7 dB. Ratio front circuits included filtration, amplification and down-convertion when signals extracted from CBPM. Offline caliberation test results showed that CBPM has excellent measurement value of linearity area, which is over 10 mm. After frequency spectrum analysis and linear fitting, the position resolution of CBPM is 2.87 μm in horizontal direction and 2.16 μm in vertical direction.-
Key words:
- BEPCⅡ /
- cavity beam position monitor /
- TM110 /
- cross-talk isolation /
- position resolution
-

图 1 TM110模式在理想谐振腔、变形谐振腔和优化后的谐振腔的场分布示意图
Figure 1. TM110 electromagnetic fields distribution in perfect resonator, distortional resonator and optimized resonator
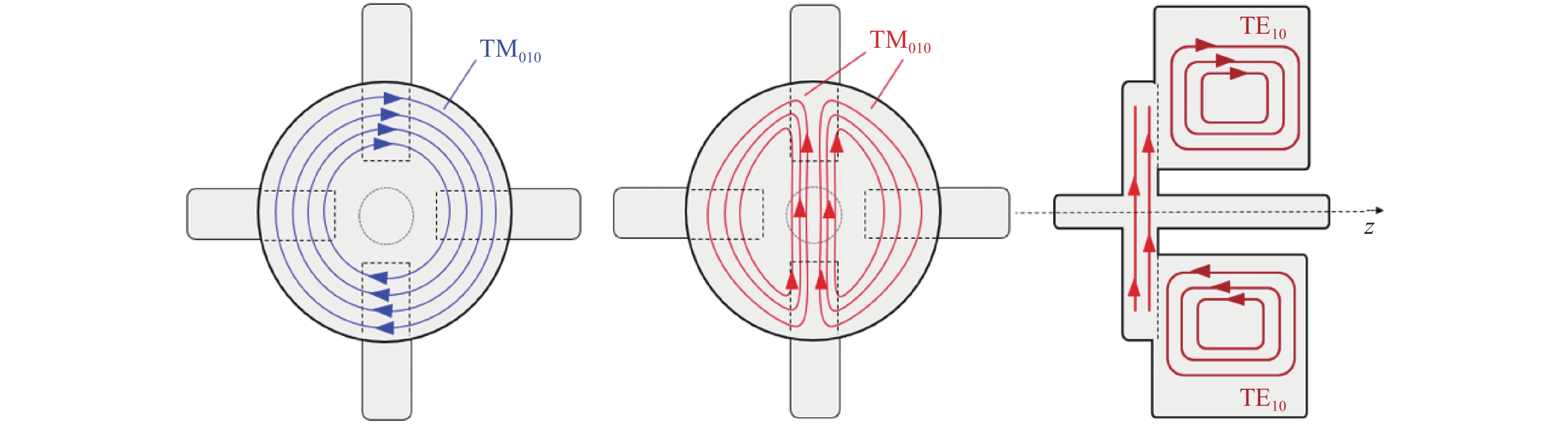
图 2 使用Com-Free BPM的CBPM腔体内的场分布
Figure 2. Eletromagnetic fields distribution in cavity with Com-Free BPM method
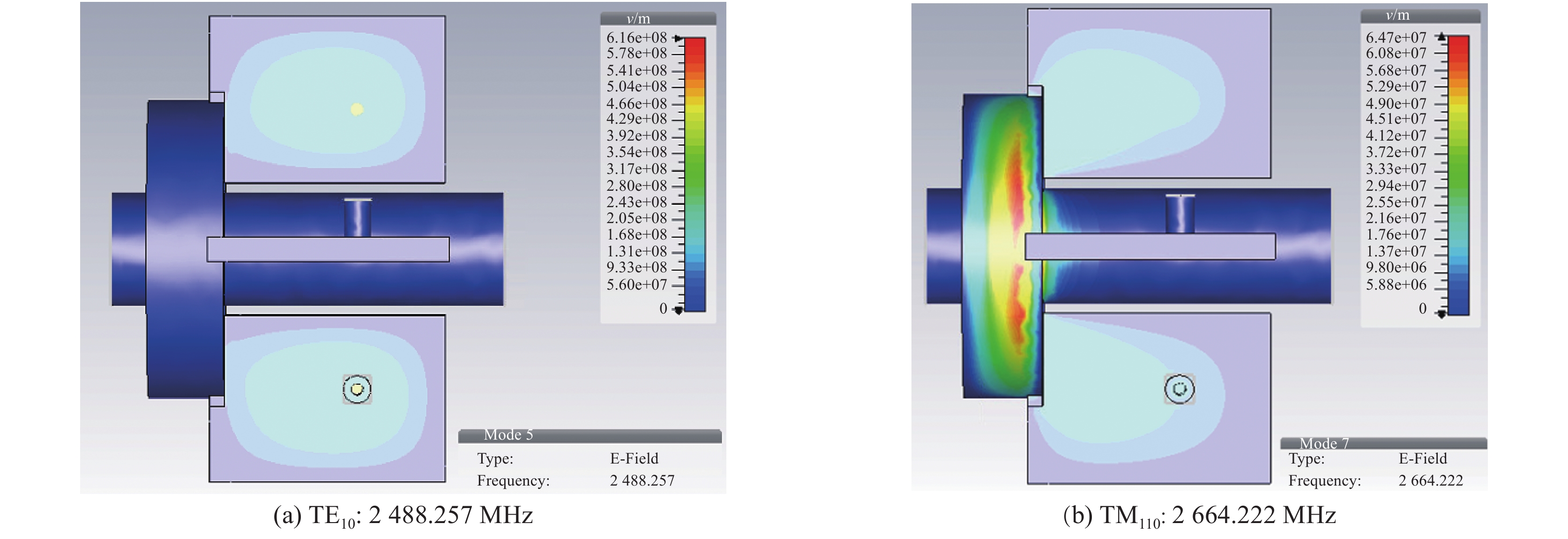
图 3 TE10模式与TM110模式电磁场分布示意图
Figure 3. Electromagnetic fields distribution of TE10 and TM110

图 4 使用Cut-through BPM方法优化后的位置腔真空模型
Figure 4. Vacuum model of optimized position cavity with Cut-through BPM method
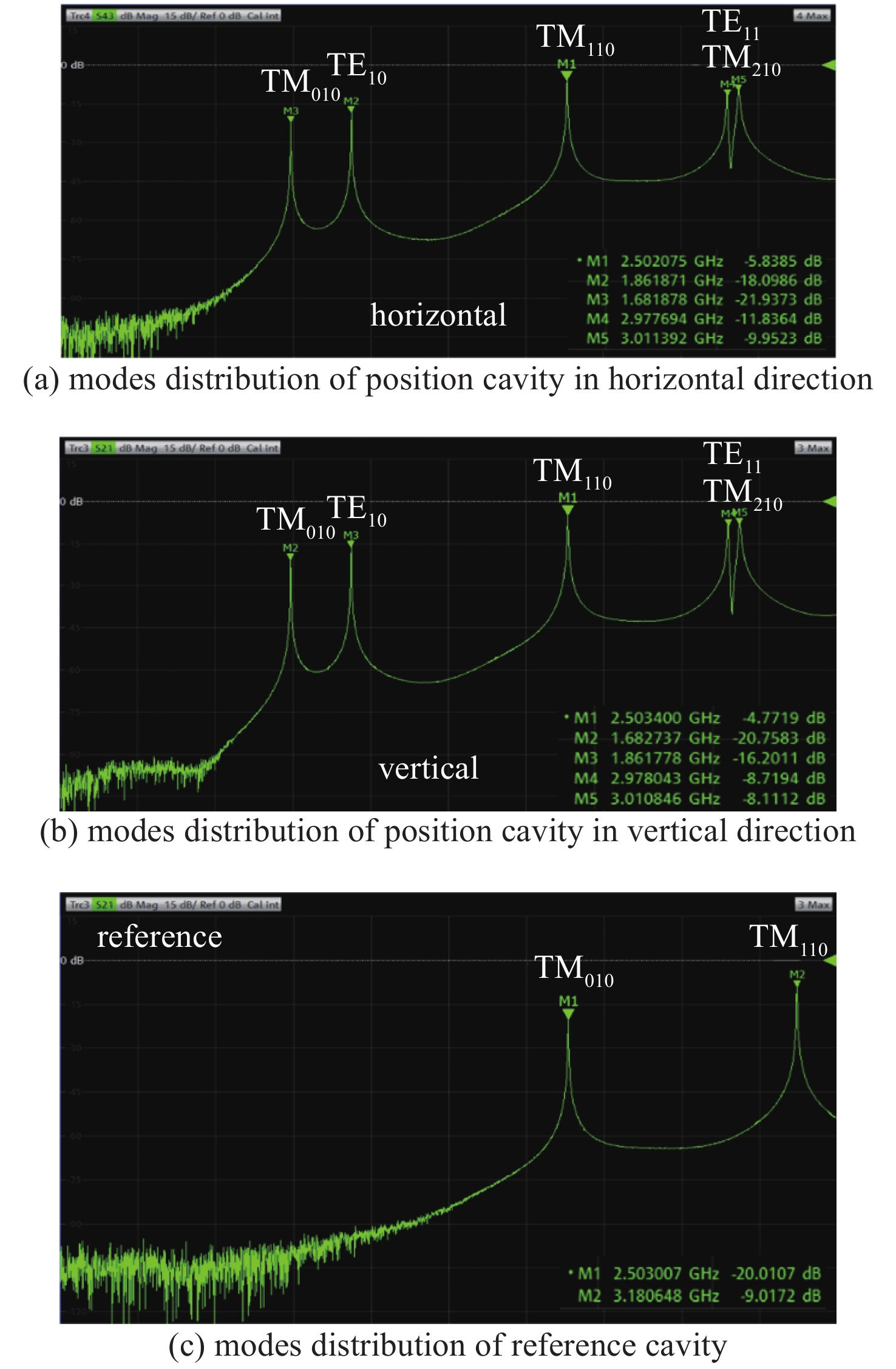
图 6 使用网络分析仪对第二版CBPM测试结果
Figure 6. Performance test of the second CBPM by network analyzer
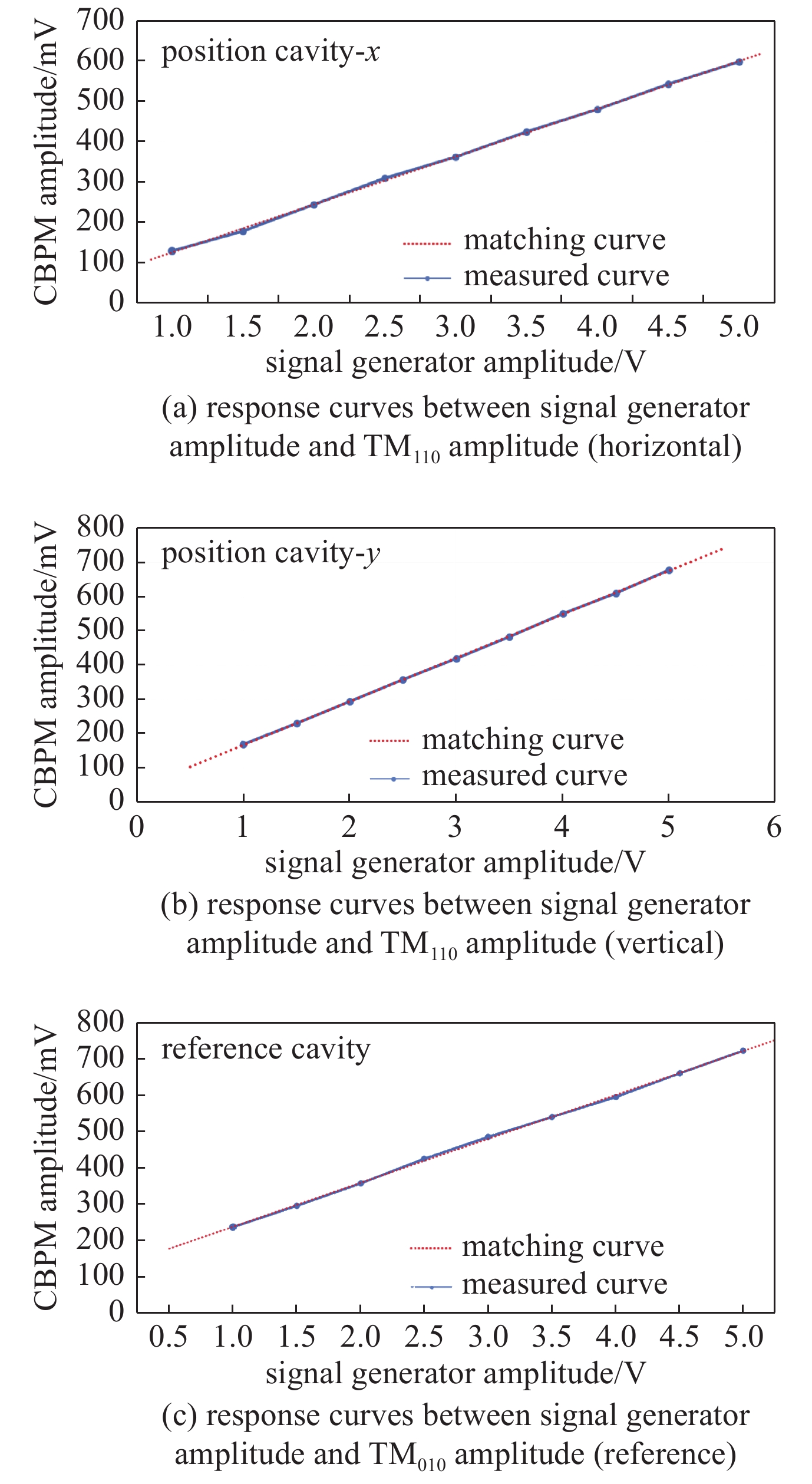
图 9 信号源输出幅度与CBPM信号输出幅度响应曲线
Figure 9. Ampilitude of signal source and CBPM output signal response curve
表 1 CBPM交叉隔离度测试结果
Table 1. Results of CBPM cross-talk isolation test
ports bandwidth/MHz isolation/dB 1-2 1000 -44.7043 2-3 1000 -44.7040 3-4 1000 -44.7038 4-1 1000 -44.7046  下载: 导出CSV
下载: 导出CSV
-
[1] Inoue Y, Hayano H, Honda Y, et al. Development of a high-resolution cavity-beam position monitor[J]. Physical Review Special Topics - Accelerators and Beams, 2008, 11: 062801. doi: 10.1103/PhysRevSTAB.11.062801 [2] Lorenz R. Cavity beam position monitors[C]//AIP Conference Proceedings. 1999: 53-73. [3] Wiedemann H. Particle accelerator physics[M]. USA: Springer, 2007. [4] Jackson J. Classical electrodynamics[M]. John Wiley & Sons. 2007. [5] Pozar D M. Microwave engineering (Third edition)[M]. Publishing House of Electronics Industry. 2010. [6] Lorenz R, Sabah S, et al. Cavity-type beam position monitors for the SASE FEL at the TESLA Test Facility[R]. CM-P00042566, 2003. [7] Luo Qing, Sun Baogen. Design of S-band re-entrant cavity BPM[J]. Nuclear Science and Techniques, 2009, 20(3): 133-139. [8] Sargsyan V. Cross-talk problem in pillbox cavity[R]. Technische Universitat Berlin and DESY-Zeuthen, TESLA 2003-01. [9] Chen Xiangcheng. History of cavity beam position monitors[R]. GSI-Report-2014-3. [10] Zhou Jiashen, Cao Jianshe, Sui Yanfeng, et al. Design and simulation of cavity BPM for BEPCII[J]. Radiation Detection Technology and Methods, 2019, 3(3): 1-6. [11] Dassault System. CST Studio Instruction Book[EB/OL]. https://www.3ds.com/products-services/simulia/products/cst-studio-suite/solvers/. [12] ROHDE & SCHWARZ R&B ZNB4 Introduction[EB/OL]. https://www.rohde-schwarz.com.cn/product/znb-productstartpage_63493-11648.html. [13] Teledyne LeCroy WavePro 760Zi-A Introduction[EB/OL]. http://www.teledynelecroy.com.cn/product/proDetail_29.html. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 1088
- HTML全文浏览量: 256
- PDF下载量: 47
- 被引次数: 0
