

Development of Trim-rod driving system for CYCIAE-230 superconducting cyclotron
-
摘要: 在230 MeV超导回旋加速器中,磁场调节棒及其驱动系统是束流调试的重要辅助装置。为满足束流对中和束流引出所需的磁场,设计并研制了16套磁场调节棒及其驱动装置。机械执行机构采用美国Thomson公司的精密直线执行器,其重复定位精度为±0.01 mm,位置传感器采用德国Novotechnik公司的直线位移电子尺,其重复精度为0.002 mm。此外,运动控制采用PLC加直线位移传感器负反馈闭环的方案。在实际工况下,系统定位精度达到0.05 mm,重复精度达到±0.02 mm,优于设计要求。此外,对该系统进行了静电放电测试、电快速瞬变脉冲群测试和浪涌抗扰度测试,结果满足医用电气设备电磁兼容标准YY 0505-2012/IEC 6060 1-1-2:2004的要求。该驱动系统的研制,克服了在强电离辐射、高磁场强度、狭小安装空间的特殊环境中达到高定位精度和高重复精度的难点,对优化束流的径向进动、减小加速区域的相干振荡振幅、提高引出区的束流引出效率等具有重要意义。
-
关键词:
- 230 MeV超导回旋加速器 /
- 磁场调节棒 /
- PLC /
- 直线位移传感器 /
- 电磁兼容
Abstract: The magnetie field adjustable rod (Trim-rod) and its driving system are the important auxiliary device for beam debugging in CYCIAE-230. To get the magnetic field playing a key role in maintaining the beam alignment and extraction, 16 sets of Trim-rods and driving systems were developed. First, the precise linear actuator from Thomson of The United States was used as the mechanical actuator, whose repeated positioning accuracy is ±0.01 mm. Second, the position sensor adopted the linear displacement electronic ruler from Novotechnik of Germany. The repeated positioning accuracy of the electronic ruler is 0.002 mm. In addition, a negative feedback control loop based on PLC module and linear displacement sensor was adopted in Trim-rods movement regulation. In fact, the positioning accuracy and repeatable precision of Trim-rod drive system were 0.05 mm and ±0.02 mm, respectively. Moreover, the system weat through the electrostatic discharge test, electrical fast transient/Brust test and surge immunity test, all met the requirement of YY 0505-2012/IEC 6060 1-1-2:2004. It is proved that the developed Trim-rod driving system can get high positioning accuracy and repeatable precision in high-dose ionizing radiation, high-density magnetic field and narrow space. It is very significant for radial oscillation amplitude minimization, avoiding coherent oscillation and increasing high beam extraction efficiency. -

图 2 CYCIAE-230磁场调节棒驱动系统架构图
Figure 2. Architecture diagram of trim-rod drive system on CYCIAE-230
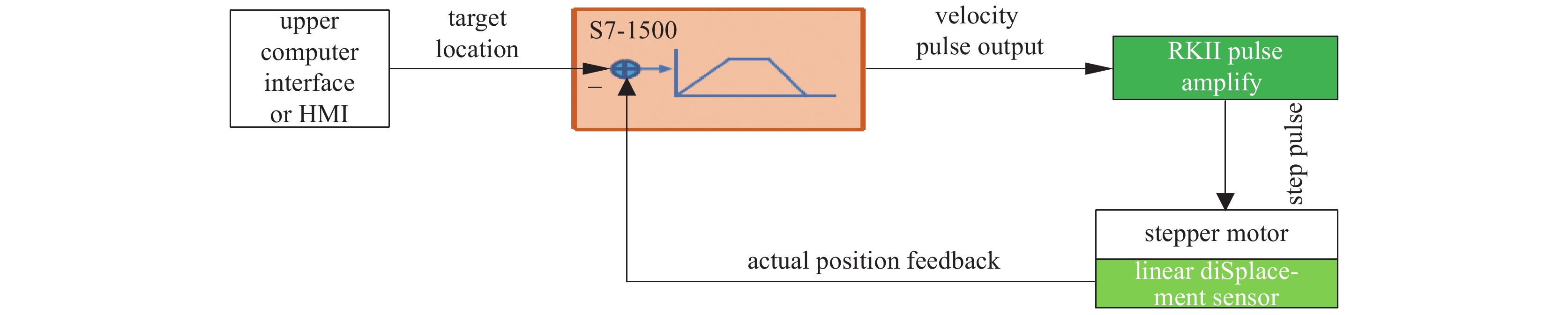
图 3 CYCIAE-230磁场调节棒驱动控制原理图
Figure 3. Control principle of trim-rod drive system on CYCIAE-230
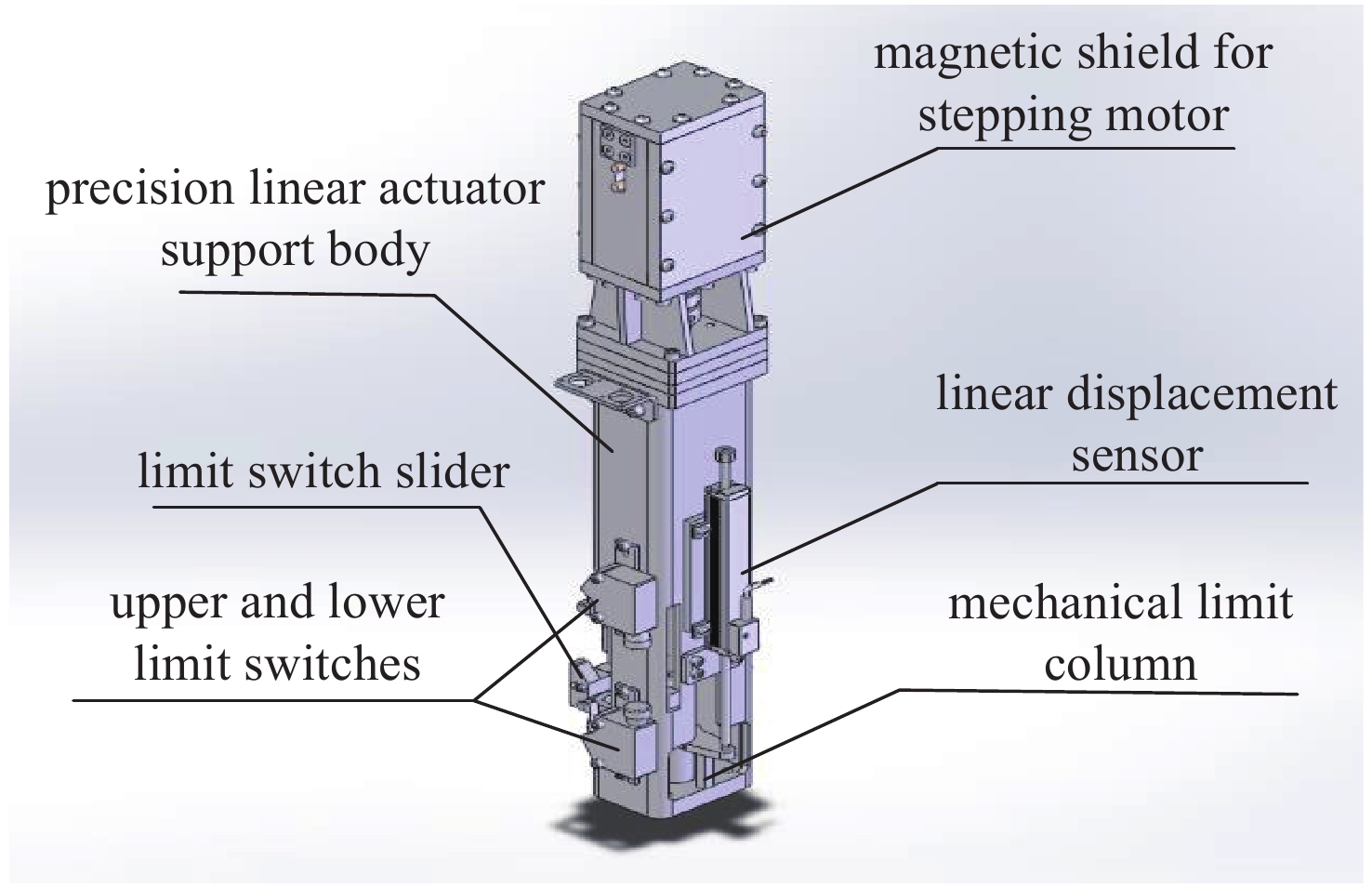
图 4 CYCIAE-230磁场调节棒驱动机械结构示意图
Figure 4. Schematic diagram of mechanical structure of trim-rod drive system on CYCIAE-230

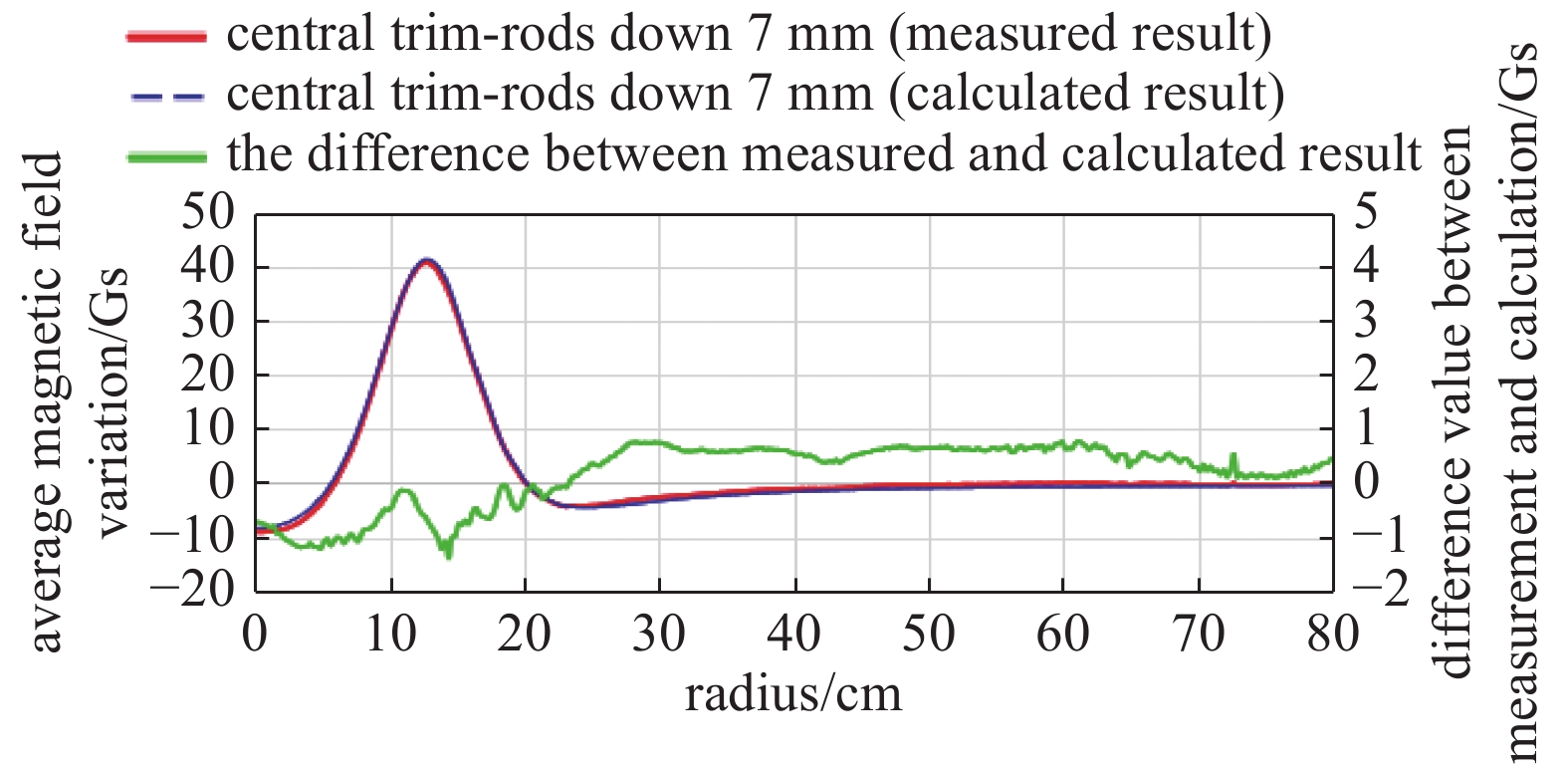
图 5 引出区磁场调节棒的定位精度
Figure 5. Positioning accuracy of the trim-rods in extraction region
表 1 CYCIAE-230磁场调节棒驱动系统技术参数
Table 1. Parameters of Trim-rod drive system on CYCIAE-230
parameter technical indicator maximum driving force/N 2100 center stroke/mm ±10 extraction stroke/mm ±30 positioning accuracy/mm 0.1 repeat positioning accuracy/mm 0.05 magnetic shielding effect/Gs <200 power self-locking needed limit switch needed  下载: 导出CSV
下载: 导出CSV
-
[1] Zhang Tianjue, Wang Chuan, Li Ming, et al. Developments for 230 MeV superconducting cyclotrons for proton therapy and proton irradiation[J]. Nuclear Instruments and Methods in Physics Research Section B: Beam Interactions with Materials and Atoms, 2017, 406: 244-249. doi: 10.1016/j.nimb.2016.11.010 [2] Zhang Tianjue, Li Ming, Wang Chuan, et al. Investigation and quantitative simulation of beam physics for 230 MeV SC cyclotron under construction at CIAE[J]. Nuclear Instruments and Methods in Physics Research Section B: Beam Interactions with Materials and Atoms, 2020, 468: 8-13. doi: 10.1016/j.nimb.2020.02.008 [3] Zhang Lige, Fan Kj, Hu Shengwei, et al. Design of the trim coil for the superconducting cyclotron extraction[C]//IPAC2018.2018. [4] Kim J W, Goto A, Yano Y. Trim coil system design of a superconducting ring cyclotron[J]. Review of Scientific Instruments, 1999, 70(5): 2293-2299. doi: 10.1063/1.1149755 [5] Stephani T, Röcken H, Behrens U, et al. Automated operation and optimization of the Varian 250 MeV superconducting compact proton cyclotron[C]//Proceedings of Cyclotrons. 2010. [6] Bigham C B. Magnetic trim rods for superconducting cyclotrons[J]. Nuclear Instruments and Methods, 1975, 131(2): 223-228. doi: 10.1016/0029-554X(75)90323-7 [7] Heighway E A. Movable steel trim rods and the orbit dynamics of the chalk river superconducting heavy ion cyclotron[J]. IEEE Transactions on Nuclear Science, 1977, 24(3): 1479-1481. doi: 10.1109/TNS.1977.4328984 [8] Zhang Dongsheng, Li Ming, Wang Chuan, et al. Physical design of the extraction trim-rod in a 230 MeV superconducting cyclotron[C]//Proceedings of cyclotron. 2016. [9] 温立鹏, 安世忠, 曹磊, 等. 100 MeV强流质子回旋加速器剥离靶驱动控制系统研制[J]. 原子能科学技术, 2018, 52(12):2296-2301. (Wen Lipeng, An Shizhong, Cao Lei, et al. Development of driving control system of stripping target for CYCIAE-100[J]. Atomic Energy Science and Technology, 2018, 52(12): 2296-2301 doi: 10.7538/yzk.2018.youxian.0355 [10] 张祎王, 曹磊, 侯世刚, 等. CYCIAE-100回旋加速器质子照相束流线控制系统的研制[J]. 原子能科学技术, 2018, 52(1):156-160. (Zhang Yiwang, Cao Lei, Hou Shigang, et al. Design and implementation of control system for CYCIAE-100 cyclotron beam line of proton radiography[J]. Atomic Energy Science and Technology, 2018, 52(1): 156-160 -



 点击查看大图
点击查看大图

计量
- 文章访问数: 2084
- HTML全文浏览量: 373
- PDF下载量: 67
- 被引次数: 0
